در دنیای اتوماسیون، انواع مختلفی از سیستمهای موقعیتیابی وجود دارد. این موارد عبارتند از مکانیکی، اپتیکال (نوری)، مغناطیسی، فراصوت (التراسونیک)، القایی، سیستمهای دوربینمحور یا ترکیبی از تکنولوژیهای مختلف. تعیین اینکه کدام یک برای کاربرد موقعیتیابی شما موثر است، در موفقیت فرآیندهای اتوماتیک و خودکار شما حیاتی است.

سیستمهای مکانیکی
وقتی که یک جسمی را به شکل الکتریکی، هیدرولیکی یا پنوماتیک جابجا میکنید، دانستن موقعیت قطعاتی که قرار است جابجا شوند ضروری است.
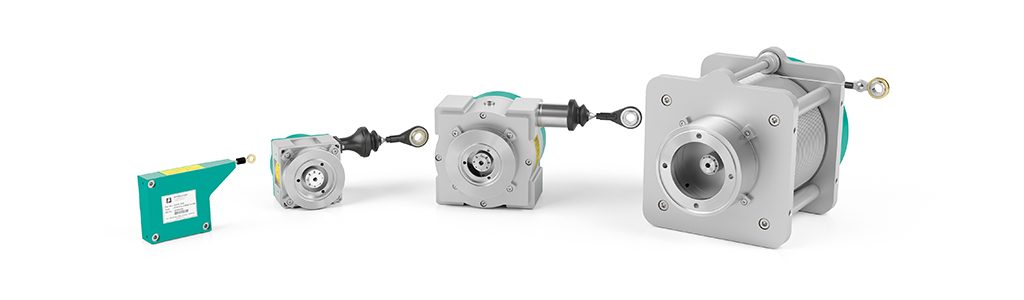
اتصال سیمکش به قطعات، بازخوردی از موقعیت مکانیکی برای طول خطی ارائه میکند، اما یک انکودر چرخی یا پتانسیومتر برای خروجی الکتریکی نیز مورد نیاز است.
سیمکشها را میتوان در فضاهای تنگ و کثیف نصب کرد، جایی که دیگر تکنولوژیها همچون سنسورهای نوری یا سنسورهای التراسونیک به سختی نصب و استفاده میشوند.
تا سقف ۶۰ متر، سیمکشها با قرقره جانبی همراه میشوند که موقعیتیابی در زوایای مختلف یا گوشهها را ممکن میسازد. معمولا در لیفت یا بالابرهای قیچی (scissor) و اکستنشنهای بوم (boom) استفاده میشوند.
یک تکنولوژی دیگر که از روشهای مکانیکی و الکتریکی استفاده میکند MEMS است یا سیستمهای میکروالکترومکانیکی. این سنسورهای شیب و شتاب، نیروی شتاب گرانشی وارد شده به المانهای میکرومکانیکی را با دقت و صحت اندازهگیری میکنند.
نیروی بردار زاویهای را میتوان محاسبه کرد و برای بازخورد شیب یا تیلت (tilt) استفاده کرد. مثلا برای اکستند کردن بومها روی یک کامیون یا وانت بزرگ از MEMS استفاده میشود. این دستگاه تایید میکند که کامیون تراز است، تا بوم بتواند به شکلی ایمن، تا حداکثر طول خود باز شود.
سیستمهای دوربینمحور برای سیستمهای موقعیتیابی
سیستمهای موقعیتیابی دوربینمحور دوبعدی همچون سیستمهای موقعیتیابی ماتریس داده PCV و PXV برای موقعیتیابی مطلق و غیرخطی غیرتماسی، از کدهای ماتریس داده برای موقعیتیابی وسایل نقلیه روی یک ترک در محور X استفاده میکنند.
سیستمهای دوربینمحور اختصاصی همچون PGV از کدهای ماتریس داده و خطوط رنگی برای رهگیری مسیر استفاده میکنند. این سیستم برای موقعیت در دو محور خروجی ارایه می کند، X و بازخورد زاویهای ۳۶۰ درجه.
جرثقیلها، AMRها، کانوایرهای مونوریل و دیگر کاربردها از این سیستمها برای رهگیری دقیق و بازهی بزرگ موقعیت بهره میبرند.

سیستمهای نوری (اپتیکال)
چند نوع از محصولات مختلف همچون سیستم انکودینگ موقعیت WCS از تکنولوژی نوری برای موقعیتیابی مطلق استفاده میکنند. یک هد خوانش نوری میتواند با خواندن یک ریل کد (code rail) موقعیتیابی مطلق را انجام دهد.
این هد خوانش، غیرتماسی است و میتواند در مسیرهای طولانی خطی یا منحنی استفاده شود. با اضافه کردن چند لوازم جانبی، این هد خوانش نوری میتواند در شرایط سخت محیطی نیز استفاده شود. کاربردها عبارتند از آسانسورها، جرثقیلها و مخازن گالوانیزهساز.

انکودرهای چرخشی میتوانند از سنسینگ نوری یا مغناطیسی برای نظارت بر سرعت، موقعیت، زاویه و شتاب استفاده کنند. صنایع خودروسازی، تجهیزات سیار و حمل و جابجایی مواد، چندی از صنایع هدفی هستند که میتوانند از مزایای انکودرهای چرخشی استفاده کنند.

سیستمهای القایی در سیستمهای موقعیتیابی
تکنولوژی القایی غیرتماسی میتواند موقعیت را با استفاده از چند پیکربندی مختلف تشخیص بدهد.
یک پوشش سنسور را میتوان با یک سیمپیچ القایی برای خروجی آنالوگ یا گسسته ترکیب کرد. یا به عنوان راهی دیگر، یک پوشش سنسور را میتوان با سیمپیچهای القایی بسیاری ترکیب کرد تا موقعیت خطی یا چرخشی را به دست آورد.
سنسورهای موقعیتیابی القایی در طول و نسخههای مختلفی موجود هستند که باعث میشود نصب ساده شود. کاربردهای احتمالی برای اندازهگیری موقعیت القایی عبارت است از موقعیت عملگر (actuator) شیر، کنترل dancer/web و موقعیت شیر knife gate.
با رشد نیاز به بازخورد موقعیت و کارکرد مستقل خودکار، این تکنولوژیهای سیستم موقعیتیابی نقشی حیاتی در دنیای اتوماسیون ایفا میکنند.
فرقی نمیکند که نیاز شما نظارت بر موقعیت AGV، شیر یا جرثقیل باشد، یک یا چند مورد از این سیستمها را میتوانید استفاده کنید تا به نتایج مطلوب و مورد نظر خود برای کاربرد منحصر به فرد خود دست پیدا کنید.
این مطلب از وب سایت برند پپرل اند فاکس گرفته شده است.