
فهرست مطالب
- نحوه عملکرد یک روتاری انکودر
- انکودرهای نوری (اپتیکال)
- انکودر مغناطیسی
- انکودر القایی
- مقایسه انکودر افزایشی با رزولورها
- مقایسه انکودرهای افزایشی با انکودرهای مطلق
- موارد استفاده و کاربردهای انکودرهای افزایشی
- مزایای روتاری انکودر های مطلق
- چه زمانی به انکودر مطلق نیاز دارید
- انکودر موتور چیست؟
- نکات بیشتر در انتخاب انکودرها
- در یک انکودر به چه میزان رزولوشن نیاز دارید؟
- در انتخاب انکودر خروجی مورد نیاز چیست؟
- چطور انکودر را به کنترلرهای خود متصل کنیم؟
- انکودر چه تنشهای مکانیکی و محیطی را باید تحمل کند؟
- آیا انکودر باید گواهی و تاییدیههای ایمنی استفاده در نواحی خطرناک را داشته باشد؟
- کاربردهای انکودر
- مزایای انکودر
- معایب انکودر
- خرید انکودر
نحوه عملکرد یک روتاری انکودر
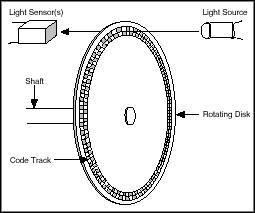
روتاری انکودرها برای اندازهگیری حرکت چرخشی یک محور استفاده میشوند. در شکل زیر، اجزای بنیادی یک روتاری انکودر نمایش داده شده که شامل دیود نورگسیل یا همان LED، یک دیسک و یک آشکارساز نور در سمت دیگر دیسک است. این دیسک که روی محور چرخشی نصب است، الگوهایی از بخشهای مات و شفاف دارد که روی دیسک کد شدهاند. با چرخش دیسک، بخشهای مات نور را مسدود میکند و از بخشهایی که شیشه شفاف است، نور اجازه عبور دارد. بدین ترتیب پالسهای موج مربعی (square-wave) ایجاد میشوند. این پالس ها میتوانند موقعیت یا حرکت را تفسیر کنند.
انکودرها معمولا ۱۰۰ تا ۶۰۰۰ بخش در هر چرخه دارند. این یعنی این انکودرها میتوانند ۳٫۶ درجه رزولوشن برای انکودری با ۱۰۰ بخش و ۰٫۰۶ درجه رزولوشن برای انکودری با ۶۰۰۰ بخش ارائه کنند.
اساس کارکرد انکودرهای خطی با روتاری انکودر ها یکسان است با این تفاوت که به جای دیسک چرخشی، یک نوار مات ثابت دارد که روی سطح آن برشهای شفاف وجود دارد و یک آشکارساز LED که به بدنهی متحرک آن متصل شده است.
یک انکودر با یک مجموعه از پالسها مفید نیست چون نمیتواند نشانگر چرخش باشد. با استفاده از دو ترک کد با بخشهایی که ۹۰ درجه خارج از فاز هستند، دو کانال خروجی انکودر، هم موقعیت و هم جهت چرخش را نشان میدهد. مثلا اگر A به B منتهی شود، دیسک در جهت عقربههای ساعت میچرخد. اگر B به A باشد، دیسک در جهت خلاف حرکت ساعت میچرخد. در نتیجه، با نظارت بر هر دو تعداد پالسها و فاز نسبی سیگنالهای A و B، میتوانید هم موقعیت و هم جهت چرخش را زیر نظر بگیرید.
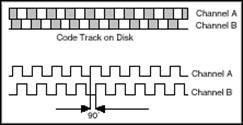
به علاوه، برخی انکودرهای quadrature شامل یک کانال خروجی سوم هم میشوند – که به آن سیگنال مرجع یا صفر گفته میشود – که یک پالس سیگنال در هر چرخه ارائه میکند. میتوانید از این پالس سیگنال برای تعیین دقیق موقعیت مرجع استفاده کنید. در اکثریت انکودرها، به این سیگنال، ترمینال Z یا شاخص گفته میشود.
به انکودرهای فوق انکودرهای quadrature افزایشی تکانتها (single-ended) گفته میشود چون سیگنالهای A و B هر دو به زمین مرجع شدهاند، پس یک سیم (یا یک انتها) به ازای هر سیگنال وجود دارد. یک نوع انکودر رایج دیگر، انکودر تفاضلی (دیفرانسیل) است که برای هر سیگنال A و B دو خط وجود دارد. برای سیگنال A، دو خط A’ و A و برای سیگنال B ، دو خط B’ و B. به این نوع پیکربندی push-pull (فشار- کشش) گفته میشود چون هر چهار خط همیشه یک ولتاژ مشخص را تغذیه میکنند (یا ۰ V یا Vcc). وقتی A Vcc باشد، A’ برابر با ۰ V است و وقتی A برابر با ۰ V باشد، A’ برابر با Vcc خواهد بود. انکودرهای تفاضلی معمولا در محیطهایی استفاده میشوند که نویز الکتریکی وجود دارد چون اندازهگیریهای تفاضلی، از درستی سیگنال محافظت میکند.
در انکودرهای افزایشی، شما میتوانید تنها تغییرات در موقعیت را اندازهگیری کنید (که با استفاده از آن میتوان سرعت و شتاب را تعیین کرد)، اما نمیتوان موقعیت مطلق یک شیء را تعیین کرد. نوع سوم انکودرها، انکودرهای مطلق هستند که میتوانند موقعیت مطلق یک شیء را تعیین کنند. این نوع انکودرها مثل انکودرهای افزایشی، بخشهای شفاف و مات تعویضشونده (یکی در میان) دارند اما انکودر مطلق از چندین گروه از بخشها استفاده میکند که دایرههای متحدالمرکز روی چرخ انکودر تشکیل میدهند، مثل هدف تیراندازی در دارت. این دایرههای هممرکز از وسط چرخ انکودر شروع میشوند و حلقه ها از داخل به خارج، هر یک دو برابر تعداد بخشها را نسبت به حلقه قبلی دارند. اولین حلقه، که داخلیترین حلقه است، یک بخش شفاف و یک بخش مات دارد. دومین حلقه از وسط، دو بخش شفاف و دو بخش مات دارد و سومین چهار بخش. اگر انکودر ۱۰ حلقه داشته باشد، خارجیترین حلقه آن ۵۱۲ بخش دارد و اگر ۱۶ حلقه داشته باشد، خارجیترین حلقه آن ۳۲۷۶۷ بخش.
چون هر حلقه انکودر مطلق، دوبرابر بخش بیشتر از حلقه قبلی دارد، این مقادیر یک سیستم شمارش باینری (دودویی) را تشکیل میدهند. در این نوع انکودر، یک منبع نور و گیرنده (ریسیور) برای هر حلقه از چرخ انکودر وجود دارد. این یعنی انکودری با ۱۰ حلقه، ۱۰ ست منبع نور و گیرنده دارد و انکودری با ۱۶ حلقه، ۱۶ منبع نور و گیرنده.
شرایط محیطی کاربرد شما، روی مهمترین عامل انتخاب انکودر (نوع موتور سنسور) موثر است. رایجترین موتورهای سنسور، نوری، مغناطیسی یا القایی هستند.
انکودرهای نوری (اپتیکال)
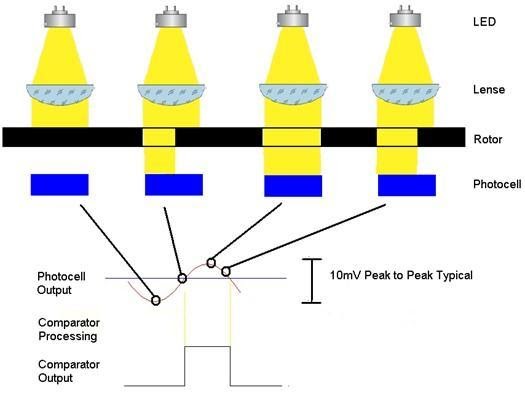
نحوه کارکرد. در یک انکودر نوری، یک دیسک الگودار به جسم در حال نظارت متصل است (معمولا محور موتور یا بار) و بین یک منبع (عموما یک LED) و یک حسگر نور چسبیده به بدنه انکودر عبور میکند. الگوی دیسک یا پرتوی نور را تکه تکه میکند تا سلسلهای از پالسهای موج مربعی یا یک کلمه دیجیتال باینری تولید کند. در هر یک از دو این حالت، کنترل/ بازخوانی (readout) از این داده استفاده میکند تا موقعیت را تعیین کند و اگر بشود، سرعت را تعیین کند. در یک انکودر نوری خطی، هم منبع و هم آشکارساز با بار حرکت میکند و همزمان مقیاس خطی که خروجی را تولید میکند، به قاب ماشین ثابت شده است.
مزایا: انکودرهای نوری بالاترین رزولوشن را در این کلاس از دستگاههای بازخورد دارند. در نتیجه میتوانند برای کاربردهای علمی و صنعتی پیچیده مناسب باشند که نیازمند رصد موقعیت زاویهای بر اساس ترتیب کسرهایی از درجه است.
معایب: انکودرهای نوری در برابر آلایندگی حساس هستند و نباید برای کاربردهایی استفاده شوند که آنها را در معرض گرد و غبار، رطوبت یا مواد شیمیایی خورنده قرار دهد. انکودرهای نوری با دیسکهای کد شیشه در برابر ضربه و لرزش آسیبپذیر هستند. این روزها، دیسکهای پلیاستر مایلر (mylar) رایج هستند و در برابر ضربه و لرزش دوام بیشتری دارند.
بهترین موارد استفاده: کاربردهای علمی و صنعتی که عملکردهای بالاتری را نیاز دارند.
انکودر مغناطیسی
نحوه کارکرد: کارکرد انکودرهای مغناطیسی مشابه انکودرهای نوری است با این تفاوت به جای دیسکهای کد نوری، روتاری انکودرها مغناطیسی از یک ساختار متفاوت برای آشفته ساختن میدان مغناطیسی استفاده میکنند، همچون یک دنده فلزی آهنی دندانهدار یا طبل یا دیسکهایی با الگوهای یک درمیان دامنههای مغناطیسی. دامنههای یکی درمیان، یک میدان مغناطیسی متغیر ایجاد میکنند که میتوان با چندین تکنولوژی آن را شناسایی کرد، همچون پیکاپ (انتخاب) های مغناطیسی ساده یا آشکارسازهای محدود کننده مغناطیسی که سرعت های عملکرد بالاتری ارائه میدهند. در عوض، سنسور Hall-Effect از آرایه آشکارساز حالت جامد استفاده میکند که راه حلی اقتصادی و بادوام بوده و رزولوشن و حساسیت بالا نسبت به تحمل ضربه های بالا را دارا می باشد.
مزایا: انکودرهای مغناطیسی میتوانند شرایط به شدت سخت محیطی را تحمل کنند و در نتیجه مناسب کاربردهای صنعتی هستند. میتوانند زیر آب کار کنند، یا کاملا در گرد و غبار باشند و در معرض لرزشهای بسیار قوی قرار بگیرند. این انکودرها اقتصادی هستند و برای کاربردهایی با بودجه محدود مناسب هستند.
معایب: به میدانهای مغناطیسی قوی حساس بوده و ممکن است نیازمند محافظ باشند. بارهایی با ضربه بسیار قوی ممکن است دامنههای مغناطیسی را غیرمغناطیسی کند و در مورد دماهای بالا همانطور که گفته شد، سنسورهای Hall-effect آسیبپذیری کمتری در برابر بارهای شوکدار دارند. طبق دیدگاه سنتی، انکودرهای مغناطیسی تنها رزولوشنی متوسط ارائه میکنند. البته سنسورهای Hall-effect عملکردی بهبودیافته ارائه میکنند. برای کاربرهای سنگین در شرایط به شدت کثیف و آلوده محیطی، سنسور Hall-effect شاید انتخابی ایدهآل باشد.
بهترین موارد استفاده: کاربردهای صنعتی با شرایط سخت محیطی.
انکودر القایی
نحوه کارکرد: انکودرهای القایی شبیه به رزولورها هستند، که ترانسفورماتورهایی تفاضلی می باشند که موقعیت زاویهای مطلق یک بار چرخشی را با رصد ولتاژهای القایی در جفتی از سیمپیچهای بازخوانی readout) تعیین میکنند. سیمپیچ اصلی به روتور متصل شده و تحریک میشود و همزمان سیمپیچ سینوس ثانویه و آرکتانژانت نسبت ولتاژ سیمپیچ سینوس و ولتاژ سیمپیچ کسینوس ثانویه به استاتور متصل شدهاند. چرخش سیمپیچ اولیه، جریان را در سیمپیچهای ثانویه القا میکند و کسینوس، زاویه را به دست میآورد. رزولورها به شدت بادوام و محکم هستند اما نصب آنها ممکن است سخت باشد. انکودرهای القایی به شکلی طراحی شدهاند تا پاسخگوی این مساله باشند.
یک انکودر القایی، پیادهسازی حالت جامد از یک رزولور است. به جای سیمپیچهای سنتی، سیمپیچها المانهایی مسطح هستند که با لیتوگرافی روی یک PCB (برد مدار چاپی) الگو کشی شدهاند. تمام این سه سیمپیچ روی PCB یکسانی هستند و روی استاتور(ایجاد کننده تاخیر) نصب میشوند و یک دیسک رسانا روی روتور یا محور نصب شده که سیمپیچها را برانگیخته میکند.

مزایا: رزولوشن بسیار بالا. دوام بالا در برابر آلایندگی، نفوذ مایع، دماهای به شدت بالا و لرزش و ضربه. استفاده از آن سادهتر از رزولور است و جای کمتری اشغال میکند، به خصوص طراحی eddy-current که از فیلمهای نازک فاقد آهن با ضخامت تنها ۱۰۰ میکرومتر برای دیسک رسانا استفاده میکند.
معایب: با آنکه انکودرهای القایی بادوام و محکم هستند، اما دیسک رسانا ممکن است مشکلاتی ایجاد کند. انتخاب صحیح دیسک رسانا حیاتی است. کاربردهایی با حرارت شدید نباید از دیسکهای آهن نرم استفاده کنند. دیسکهای آهنی یا آهنرباهای فریت ممکن است در میدانهای شدید مغناطیسی استفاده شوند اما ممکن است نیازمند محافظ باشند.
بهترین موارد استفاده: کاربردهایی با شرایط سخت محیطی و نیاز به دقت/رزولوشن بالا.
مقایسه انکودر افزایشی با رزولورها
رزولورها، مثل نسخه پیشین انکودرها هستند، و تکنولوژی آنها به جنگ جهانی دوم برمیگردد. یک جریان الکتریکی ایجاد یک میدان مغناطیسی در امتداد سیمپیچ مرکزی می کند. دو سیمپیچ وجود دارد که عمود بر یکدیگر هستند. یک سیمپیچ در محل محکم و ثابت شده و دیگری با حرکت شیء، حرکت میکند. تغییرات در قدرت و موقعیت دو میدان مغناطیسی در تعامل با یکدیگر، این امکان را میدهد که رزولور حرکت شی را تعیین کند.
سادگی طراحی رزولور باعث میشود که حتی در شرایط سخت محیطی، از بازههای دمای سرد و داغ گرفته تا در معرض تشعشع و تابش بودن و حتی تداخل مکانیکی حاصل از لرزش و ضربه، نیز قابل اطمینان باشد. برخلاف انکودرهای افزایشی، رزولورها تنها داده آنالوگ خروجی میکنند که ممکن است نیازمند قطعات الکترونیکی خاص و تخصصی برای اتصال باشد.

تفاوت های انکودر (مقایسه انکودرهای افزایشی با انکودرهای مطلق)
انکودرهای مطلق در شرایطی کار میکنند که دقت و صحت برای سرعت و موقعیت، تلرانس (تحمل) خطا و تفسیر پذیری، مهمتر از سادگی سیستم است. انکودر مطلق توانایی این را دارد که در قطعی برق سیستم، «بداند نسبت به موقعیت آن کجاست» و اگر انکودر در زمان قطعی برق حرکت کند، راه اندازی مجدد شود.
انکودر مطلق اطلاعات موقعیتیابی را درک میکند و نیاز ندارد به قطعات الکترونیکی خارجی برای ارائهی شاخص پایه برای موقعیت انکودر، تکیه کند. به خصوص در مقایسه با رزولورها و انکودرهای افزایشی، نقطه قوت مهم انکودرهای مطلق این است که دقت و صحت موقعیتیابی آنها چگونه روی عملکرد کلی کاربرد تاثیر میگذارد، بنابراین معمولا انکودر منتخب برای کاربردهای با دقت بالاتر همچون CNC، پزشکی و رباتیک است.
برای درک دقیق تفاوت این دو انکودر مقاله تفاوت بین انکودر چرخشی افزایشی و مطلق را مطالعه نمایید.
موارد استفاده و کاربردهای انکودرهای افزایشی
یک انکودر افزایشی طراحی شده تا برای کاربردهایی متفاوت قابل استفاده باشد. سه دستهبندی اصلی کاربردها بر اساس محیط عبارتند از:
- کاربرد سنگین (heavy duty): شرایط سخت محیطی با احتمال بالای آلایندگی و رطوبت، دمای بالا، ضربه و نیازمندیهای لرزش همچون مراکز تولید پالپ، کاغذ، فولاد و چوب.
- کاربرد صنعتی (industrial duty): شرایط عملیاتی عمومی کارخانه که نیازمندی درجهبندیهای استاندارد IP، مقاومت متوسط در برابر شوک، ضربه، لرزش و دما دارد، مشابه نیازهای صنعت غذا و نوشیدنی، نساجی، اتوماسیون عمومی کارخانه.
- کاربرد سبک/سروو (light duty/servo): شرایط محیطی کنترلشده با نیازمندیهای دقت بالا و دما همچون رباتیک، الکترونیک و نیمهرسانا.
مزایای روتاری انکودر های مطلق
انکودرهای مطلق نسبت به انکودرهای افزایشی، مزایای منحصر به فردی ارائه میکنند. آنها برای هر موقعیت محور، یک کد منحصر به فرد دارند، یعنی میتوانند اطلاعات موقعیت بسیار منحصر به فردی ارائه کنند، چون هیچ دو موقعیتی روی یک ترک (خط) یکسان نیستند. این انکودرها موقعیت واقعی را با تولید رشتهای از کدهای دیجیتال منحصر به فرد اندازهگیری میکنند که نشانگر موقعیت واقعی انکودر است و در نتیجه نیازمند یک شاخص یا نقطه مرجع است. این همچنین باعث میشود که انکودرهای مطلق یک مزیت دیگر در کاربردهای بازگشت به موقعیت خانه (ابتدایی) داشته باشند که در حالت قطعی برق، ممکن است مشکلاتی ایجاد کند.
همچنین انکودرهای مطلق نسبت به انکودرهای افزایشی، امکانات رزولوشن بالاتری را ارائه میکنند. در حالیکه انکودرهای افزایشی باید افزایشها را به یک ترک منفرد روی دیسک کد اضافه کنند و در نتیجه نسبت به ابعاد فیزیکی دیسک و تعداد پالسهای قابل دیکود شدن (رمزگشایی شدن) در برابر سرعت چرخشی انکودر (پاسخ فرکانسی) محدود هستند، انکودرهای مطلق ترکهای بیشتر را اضافه میکنند تا رزولوشنهای بالاتر را محقق کرده و به شکل پیوسته رشتهای از پالسها خروجی نکنند. در عوض توسط تعداد دفعاتی که انکودر در یک مدت نمونه که نرخ باود (baud rate) خوانده می شوند، محدود میشوند.

با خروجی کردن یک کلمه دیجیتال یا بیت به جای رشتهای از پالسها، روتاری انکودر های مطلق مزایای مختلفی را فراهم میآورند:
- رزولوشن کلی بالاتر نسبت به انکودرهای افزایشی
- عملکرد بهتر شروع بکار به خاطر زمان هومینگ پایین (یا موقعیت ابتدایی)
- شناسایی دقیق حرکت در امتداد چندین محور
- چندین پروتکل خروجی برای ادغام بهتر قطعات الکترونیکی
- ریکاوری بهتر از قطعی برق یا خرابی سیستم
انکودرهای مطلق نوری از یک دیسک کد با علائم و یک LED استفاده میکنند که نور را روی دیسک میاندازد. با چرخش دیسک همراه با محور موتور، تغییرات در موقعیت را میتوان شناسایی کرد. برای انکودرهای مطلق مغناطیسی، به جای نشانگرهای نوری، از قطبهای مغناطیسی استفاده میشود و LED هم با آرایه حسگر مغناطیسی جایگزین شده است.
تمام روتاری انکودر های مطلق بازخوردی بر اساس چرخش محور (موقعیت انکودر در ۳۶۰ درجه یا یک چرخش) ارائه میکنند، اما کاربردها بر اساس نیازمندیها متفاوت هستند تا مشخص شود که انکودر چند بار، چرخش کامل انجام داده است.
چه زمانی به انکودر مطلق نیاز دارید
روتاری انکودر مطلق اطلاعات موقعیتیابی را متوجه میشود که نیازی به قطعات الکترونیکی خارجی برای ارائه شاخص پایه برای موقعیت انکودر ندارد.
در دنیای واقعی، انکودرهای مطلق دقت کاری بالاتری برای کاربردها ارائه میکنند:
- تعیین جهت چندمحوری برای ماشینهای CNC استفاده شده در تولید قطعات
- تعیین خودکار و اتوماتیک ارتفاع تختهای قیچی (scissor beds) استفاده شده در بیمارستانها
- موقعیتیابی دقیق چندین استیبلایزر (تثبیتکننده) برای وسایل نقلیه بزرگ همچون جرثقیل و بالابرهای هوایی
- جابجایی درها یا جایگاههای اتوماتیک بدون کلید محدود کننده
- حرکت پیوسته و بی وقفه رباتیک حتی بعد از قطعی برق
به خصوص در مقایسه با رزولورها و انکودرهای افزایشی، نقطه قوت انکودرهای مطلق در شیوه تاثیرگذاری دقت موقعیتیابی روی عملکرد کلی کاربرد است.
انکودر موتور چیست؟
یک انکودر موتور، یک روتاری انکودر است که روی یک موتور الکتریکی نصب میشود و با رصد کردن سرعت و/یا موقعیتِ محور موتور، سیگنالهای بازخورد حلقهبسته (closed loop) ارائه میکند.
انواع مختلفی پیکربندی انکودر موتور وجود دارد، همچون افزایشی یا مطلق، نوری یا مغناطیسی، محور دار یا محور توخالی و غیره. نوع انکودر موتور استفاده شده به عوامل مختلفی بستگی دارد، به خصوص نوع موتور، کاربردی که نیازمند بازخورد حلقهبسته و همچنین پیکربندی نصب مورد نیاز است.

چگونه یک انکودر موتور انتخاب کنیم؟
هنگام انتخاب اجزاء برای یک سیستم کنترل حلقهبسته، ابتدا انتخاب انکودر موتور با توجه به نوع موتور انتخاب شده در برنامه تعیین می شود. رایجترین انواع موتور عبارتند از:
انکودرهای موتورهای AC
موتورهای القایی AC انتخابی محبوب برای سیستمهای عمومی کنترل ماشین اتوماسیون هستند، چون اقتصادی و بادوام و مستحکم هستند. انکودرهای موتور برای کنترل دقیق سرعت در کاربردهایی با موتورهای AC استفاده میشوند و اغلب نیاز است که IP خوب و پارامترهای شوک و لرزش مناسبی داشته باشند.
انکودرهای سروو موتور
انکودرهای موتورهای سروو (انکودرهای موتور آهنربای دائم) سیستم های کنترل بازخورد حلقهبسته را برای کاربردهایی که به صحت و دقت بالاتری نیاز دارند، ارائه می دهند و به اندازه موتورهای القایی AC مقاوم نیستند. انکودر موتور مورد استفاده در موتورهای سروو بسته به سطح وضوح و دقت مورد نیاز می تواند مدولار، افزایشی یا مطلق باشد.
انکودرهای موتور پلهای (stepper motor)
موتورهای پلهای مقرون به صرفه و دقیق هستند و اغلب در سیستمهای حلقهباز (open-loop) استفاده میشوند. در سیستمهایی که از موتور پلهای استفاده میکنند و کنترل سرعت مورد نیاز است، یک انکودر موتور افزایشی معمولا روی این موتور نصب میشود و اجازه میدهد که سیستم موتور پلهای به بازخورد حلقهبسته دست پیدا کند. انکودرهای موتور پله ای همچنین می توانند در برخی از کاربردها برای کنترل بهتر موتورهای پله ای با ارائه بازخورد دقیق از محل محور موتور در رابطه با زاویه پله استفاده شوند.
انکودرهای موتور DC
انکودرهای موتور DC برای بازخورد کنترل سرعت در موتورهای DC استفاده میشوند، جایی که آرمیچر یا روتور با سیمهای پیچیده (wound wires) داخل یک میدان مغناطیسی که توسط استاتور (ایجاد کننده تاخیر) ایجاد شده، می چرخد. انکودر موتور DC، مکانیسمی را برای اندازهگیری سرعت روتور فراهم میکند و بازخورد حلقهبسته را برای کنترل سرعت دقیق به درایو ارائه میکند.
حالات نصب انکودر موتور
عامل مهم بعدی در انتخاب انکودر موتور، شیوه نصب است. رایجترین روشهای نصب عبارتند از:
- انکودرهای موتور محوردار (shafted): از یک روش کوپلینگ برای اتصال محور انکودر موتور به محور موتور استفاده میکند. این کوپلینگ، ایزولاسیون مکانیکی و الکتریکی از محور موتور را فراهم میکند اما به دلیل کوپلینگ و محور طولانیتر مورد نیاز برای نصب انکودر موتور، هزینه را بالاتر میبرد.
- انکودرهای موتور محور توخالی(hub): انکودرهای محور توخالی از طریق یک اتصال فنردار (spring loaded tether) مستقیما روی محور موتور نصب میشوند. نصب بسیار ساده است و نیازی به همترازی محور ندارد اما برای ایجاد ایزولاسیون الکتریکی، باید با دقت عمل شود.
- انکودرهای موتور بدون یاتاقان (bearingless): به آنها رینگ مانت (مانتِ حلقه) هم گفته میشود. این روش نصب، شامل یک اسمبلی سنسور در شکل حلقه میشود که روی سطح موتور نصب میشود و یک چرخ مغناطیسی که روی محور موتور نصب میشود. این نوع پیکربندی نصب انکودر موتور معمولا در کاربردهای سنگین همچون کاغذ، فولاد و جرثقیل استفاده میشود.
نکات بیشتر در انتخاب انکودرها
برای تعیین یک انکودر، قبل از هر چیز باید نیازهای کاربرد آن را بدانید. عوامل کلیدی که باید در نظر بگیرید عبارتند از:
- شرایط محیطی همچون دما، رطوبت، ضربه و لرزش و آلودگی و آلایندگی
- نوع حرکت: یک طرفه، دو طرفه یا غیره
- شدت حرکت و حساسیت به بازگشت
- طراحی مکانیکی، شامل سازگاری آن با سیستم
- نیازمندیهای الکتریکی درایوها و کنترلرها
- پیکربندی فیزیکی، همچون فرمفاکتور (form factor)، فاصله فیزیکی بین انکودر و کنترلرها
- خروجی
- وضوح مورد نظر (CPR)
- سر و صدا و طول کابل
- کانال شاخص
- پوشش / پایه
- بودجه
قبل از تماس با تامینکننده، فروشنده یا بررسی مدلهای مختلف، هر چقدر که میتوانید اطلاعات جمعآوری کنید تا بتوانید تصمیمی آگاهانه بگیرید.
در یک انکودر به چه میزان رزولوشن نیاز دارید؟
انتخاب رزولوشن احتمالا بزرگترین محل خطا در انتخاب یک انکودر است. یک پیشفرض رایج وجود دارد و اکثرا فرض بر این است که یک انکودر با رزولوشن بالاتر احتمالا به دقت و صحت بالاتر موقعیتیابی منجر میشود. این پیشفرض الزاما صحیح نیست. دقت هر سیستم موقعیتیابی توسط قطعات مکانیکی آن محدود میشود. حتی انکودری با بالاترین رزولوشن هم موثر و کارآمد نخواهد بود اگر که انطباق در سیستم به حدی زیاد باشد که نتواند به شکلی قابل اطمینان، با دقت و صحت مورد نیاز موقعیتیابی کند.
برای تعیین رزولوشن، با تعیین کوتاهترین فاصله شناسایی مورد نیاز توسط کاربرد شروع کنید. انتخاب یک رزولوشن که چهار برابر حداقلِ افزایش (increment) است، پیشنهاد میشود. برای کاربردهای حساس میتوان این مقدار را تا ۱۰ برابر بالا برد. مقادیر بالاتر احتمالا فقط در موارد انگشتشماری مفید خواهد بود. روتاری انکودر های افزایشی با پالس در چرخه (PPR) تعریف میشوند که اشاره به تعداد خطوط الگو خورده روی دیسک کد دارد. انکودرهای خطی افزایشی در قالب خطوط به ازای واحد طول تعریف میشوند.
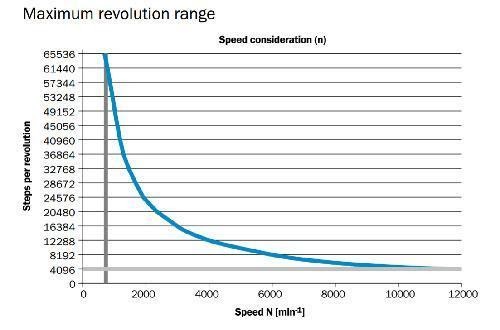
یک تفاوت بزرگ بین رزولوشن مورد نیاز برای یک کاربرد و رزولوشنی که در یک سیستم واقعی میتوان به آن دست یافت، وجود دارد. در یک روتاری انکودر افزایشی، سرعت زاویهای کاربرد (RPM) و پهنای باند قطعات الکترونیکی، یا فرکانس عملیاتی (هرتز)، تعداد پالسهایی را کنترل میکند که قابل مخابره توسط سختافزار است. ما میتوانیم با استفاده از فرمول زیر (حداکثر تعداد خط)، رزولوشنی که به شکل فیزیکی برای یک انکودر ممکن است را محاسبه کنیم:
![]()
فرکانس عملیاتی، یک مورد داخلی است که به قطعات الکترونیکی انکودر مرتبط میشود. این پارامتر توسط تولید کننده ارائه میشود و معمولا کیلوهرتز یا مگاهرتز است. اگر به خروجی با رزولوشن بالا برای سیستمی با سرعت بالا نیاز دارید، به دنبال انکودری با فرکانس عملیاتی سریعتر باشید.
برای سادهتر کردن فرآیند انتخاب انکودر، تولیدکنندگان پلات داده (data plot یا نمودار داده) از رزولوشن در تابعی از سرعت ارائه میکنند. این پلاتهای داده منحصر به یک انکودر خاص هستند و کمک میکنند که بتوان بین سرعت و عملکرد به یک تعادل رسید.
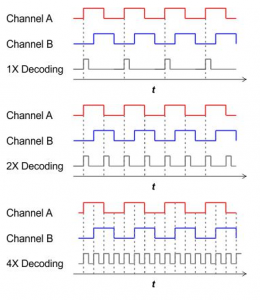
تنها راه افزایش رزولوشن، اضافه کردن خط نیست. رزولوشن تابعی از PPR و همچنین چگونگی خوانش سیگنال از حسگر نور است. که به مورد دوم (حسگر نور) دیکدینگ یا رمزگشایی گفته میشود و بستگی به این دارد که سیستم چه بخشهایی از سیگنال را برای فعال کردنش خوانش (readout) مورد استفاده قرار دهد.
معمولا از سه فرمت استفاده میشود. راهاندازی در لبهی صعودیِ کانال A (دیکدینگ ۱X) رزولوشنی برابر با PPR دیسک ارائه میکند. راهاندازی در لبهی صعودی و لبهی نزولی کانال A (دیکدینگ ۲X) رزولوشنی دو برابر PPR فراهم میآورد. راهاندازی در لبههای صعودی و نزولی هر دو کانال A و B (دیکدینگ ۴X) که رزولوشنی چهار برابر PPR ارائه میکند. بسته به کاربرد، این روش خوبی است که بدون هزینه اضافه، رزولوشن را افزایش دهید.
با این حال، این رویکرد معایبی هم دارد. برای OEM ها که میخواهند از رزولوشن مورد نیازشان مطمئن باشند، یک رزولوشن واقعی بالاتر، به جای بالاتر بردن رزولوشن به شکل نرمافزاری، به خطای احتمالی کمتری منجر خواهد شد. تکنیکهایی وجود دارد که با استفاده از آنها میتوان نویز را در کابلهای طولانی کاهش داد.
در انتخاب انکودر خروجی مورد نیاز چیست؟
برای خروجی انکودر افزایشی، کلکتور باز (OC)، فشار- کشش (push-pull)، لاین درایور (line driver) و سینوسی/کسینوسی وجود دارد.
کلکتور باز (OC) جریان نشتی کمتر و افت ولتاژ کمتری نسبت به خروجی نوع فشار – کشش دارد اما خروجی فشار – کشش مصونیت بهتر و نرخ چرخش (slew rate) بهتری دارد.
خروجی فشار – کشش میتواند NPN یا PNP باشد و در نتیجه انعطافپذیری بهتری در انطباق با ورودی کنترلر یا شمارندهی شما دارد. خروجی لاین درایور، سطح بالایی مصونیت دارد (بالاتر از کلکتور باز و فشار – کشش) بنابراین برای کابلهای بلند باید استفاده شود.
خروجی سینوسی/کسینوسی برای محاسبات سرعت و موقعیت استفاده میشود. برخی سیستمهای درایو و ایمنی موتور، ورودیهای سینوسی/کسینوسی دارند.
برای خروجی انکودر مطلق، انتخاب یک فیلدباس خاص ضروری است. انتخابهای زیادی وجود دارد، همچون اترنت (EtherNet/IP, TCP/IP, PROFINET, Powerlink)، CANopen، پروفیباس، DeviceNet، SSI، AS-Interface و Parallel. فیلدباس معمولا بر اساس سلیقه، انطباق با سختافزار موجود فعلی یا به اختیار شرکت تجهیز کننده انتخاب میشود.
چطور انکودر را به کنترلرهای خود متصل کنیم؟
انکودرها میتوانند با کابل یا کانکتور انتخاب شوند. اگر حالت کانکتور را انتخاب کنید، به یک کانکتور مطابق با آن (مثلا male و female) یا کابل آماده نیاز دارید (هم کانکتور و هم کابل).
به این شکل یک نقطه اتصال به انکودر دارید اما الزاما به این معنی نیست که تا جعبه کنترل شما قابل اتصال است. بسته به فاصله، ممکن است به یک جعبه تقسیم، لوله برق یا سینی کابل نیاز داشته باشید. برای کاهش تاثیر «نویز»، باید در هنگام کابلکشی به انکودر با دقت عمل کنید. برای کاهش این تاثیر، کابل باید روکش بافتهشده (شیلد برید) دور سیمها داشته باشد و سیمها باید زوج بههمتابیده (twisted pair) باشند.
کابل انکودر فقط باید با کابلهای DCV پایین در یک لوله برق باشد و کابلهای برق قوی AC را جدا نگه دارید. اگر در سینی کابل، کابلهای AC و DC وجود دارد، باید بین کابلهای AC و DC جداکنندهی فلزی اتصال به زمین وجود داشته باشد. اگر لازم است که کابل انکودر از روی کابل AC عبور کند، باید به شکل ۹۰ درجه عبور کند (عمودی). شیلد و روکش باید به یک زمین در جعبه کنترل شما متصل باشد.
انکودر چه تنشهای مکانیکی و محیطی را باید تحمل کند؟
همهی انکودرها مثل هم نیستند. انکودرهای ارزانتر، مقاومت مکانیکی و محافظ محیطی (IP) کمتری نسبت به انکودرهای گرانقیمتتری دارند که برای شرایط سخت محیطی طراحی شدهاند.
برای پاسخ کامل به این سوال، ابتدا باید این دو سوال را پاسخ دهیم: «کاربرد مورد نظر چه رزولوشنی نیاز دارد؟» و «من چطور انکودر را نصب کنم؟». پاسخ این دو سوال، کمک میکند که تعیین کنیم چه مقدار حرکت (run-out) وجود دارد و همچنین سرعت محور را بفهمیم. این مقادیر، سرعت محور و run-out، به تعیین بارهای محور و افست زاویه که یاتاقان انکودر در معرض آنها قرار میگیرد، کمک میکند. لرزش ماشین نیز باید با استفاده از یک شتابسنج اندازهگیری شود.
از نظر مسائلی محیطی، میزان رطوبت، مدت رطوبت، مواد شیمیایی و شیوهی تمیز کاری باید مورد تایید قرار گیرد. درجهبندی محافظت، IP54 برای اکثر کاربردها با حداقل رطوبت مناسب است اما اگر رطوبت برای زمان بیشتری حضور دارد، باید IP65 یا بالاتر را انتخاب کنید. برای شستشو با فشار بالا، انکودر باید درجهبندی IP69K داشته باشد.
آیا انکودر باید گواهی و تاییدیههای ایمنی استفاده در نواحی خطرناک را داشته باشد؟
گواهی و تاییدیه ایمنی به ایمنی افراد مرتبط است و گواهی نواحی خطرناک برای استفاده از تجهیز در مکانهایی است که احتمال وجود گاز یا گرد و غبار انفجاری وجود داشته باشد.
انکودرهای افزایشی معمولا ایمنی خروجی سینوسی/کسینوسی دارند که توسط یک مانیتور سرعت ایمنی یا (safe drive) پردازش میشوند. معمولا انکودرهای ایمنی استانداردهای نوع SIL3 (EN 62061) و PLe (IEC 13849) دارند.
انواع مختلفی گواهی و تاییدیهی مرتبط با نواحی خطرناک وجود دارد، همچون Ex (ATEX)، FM، UL، CSA، NEMA، SIL2 (IEC 61508) و SIL3 (IEC 61508).
دو روش Zone و Division برای زمان حضور مواد خطرناک (گاز یا گرد و غبار انفجاری) وجود دارد. روش Division معمولا توسط شرکتهای آمریکای شمالی و روش Zone معمولا توسط شرکتهای اروپایی استفاده می شوند. داشتن هر دو گواهی Zone و هم Division موضوعی است که هر روز مهمتر از قبل میشود.
Division 2 و Zone 2 زمانی است که مخلوط قابل اشتعال به طور معمول وجود نداشته باشد ، Zone 1 زمانی است که مخلوط قابل اشتعال به طور متناوب وجود داشته باشد ، Zone 0 زمانی است که مخلوط قابل اشتعال به طور مداوم وجود داشته باشد (برای مدت طولانی) و Division 1 زمانی است که مخلوط قابل اشتعال به طور متناوب و مداوم وجود داشته باشد (برای مدت طولانی). یک فرد دارای دانش و تجربه کافی باید ایمنی و ناحیه خطرناک را بررسی و تحلیل کند تا بتواند طبقهبندی مناسب را تعیین کند.
کاربرد انکودر
خودرو – صنعت خودرو از انکودرها استفاده می کند زیرا ممکن است حسگرهای حرکت مکانیکی برای کنترل سرعت استفاده شوند.
لوازم الکترونیکی مصرفی و تجهیزات اداری – در صنعت الکترونیک مصرفی ، انکودرها به طور گسترده ای از تجهیزات دفتری و اداری مانند تجهیزات اسکن PC ، چاپگرها و اسکنرها استفاده می کنند.
صنعتی – در صنعت صنعتی ، از انکودرها در ماشین های برچسب گذاری ، بسته بندی و ابزارآلات با کنترل کننده های موتور یک و چند محور استفاده می شود. انکودرها را می توان در کنترل دستگاه CNC نیز یافت.
پزشکی – در صنعت پزشکی ، انکودرها در اسکنرهای پزشکی ، کنترل حرکت میکروسکوپی یا نانوسکوپی دستگاه های خودکار و پمپ های توزیع استفاده می شوند.
نظامی – ارتش همچنین در استفاده از آنتن های موقعیت یاب از انکودرها استفاده می کند.
بیستر بخوانید : سنسور فشار چیست؟ چه کاربردهایی دارد؟
مزایای انکودر
– بسیار قابل اعتماد و دقیق
– وضوح بالای انکودر
– الکترونیک یکپارچه
– فناوری نوری و دیجیتال فیوزها
– قابل استفاده در برنامه های موجود
– اندازه جمع و جور
معایب انکودر
– تداخل مغناطیسی یا رادیویی (انکودرهای مغناطیسی)
– تداخل منبع نور مستقیم (انکودرهای نوری)
– در معرض آلودگی های آلودگی به خاک ، روغن و گرد و غبار
خرید انکودر
در بازار ایران انکودرهای افزایشی بیشتر مرسوم هستند و برندهای معروف و متداول آتونیکس، پپرل اند فوکس، هانیانگ و برندهای چینی مقرون به صرفه هستند. انکودرهای ابسلوت به دلیل قیمت بالا بیشتر به صورت واردات و موارد بازرگانی خریداری می شوند. شما دوستان گرامی برای خرید انکودرهای ابسلوت می توانید با کارشناسان ما به صورت مستقیم و تلفنی پیگیری نمایید و از مشاوره های فنی و بازرگانی رایگان استفاده نمایید. برای خرید با بهترین قیمت و موجودی بازار در برندها و قیمت های مختلف نیز می توانید به صفحه محصولات انکودر صنعت تک مراجعه نمایید.
امیدواریم این مقاله مفید واقع شود لطفا نظرات خود را با ما در میان بگذارید.

سخن آخر :
اتوماسیون صنعتی صنعت تک، یک مجموعه تخصصی آموزش ، معرفی و فروش تجهیزات اندازه گیری فشار از جمله سنسور فشار ، ترانسمیتر فشار ، پرشر سوئیچ (پرشر سوئیچ دانفوس)و گیج فشار است که به مشتریان خود کمک می کند به راحتی سنسور یا ترانسمیتر مناسب خود را شناسایی و در صورت نیاز خرید کنند. شما همواره می توانید جهت مشاوره و یا راهنمایی با شماره ۰۲۱۴۴۰۳۲۵۷۸ تماس بگیرید.
گردآورنده: اسفندیاری هستم. علاقه مند به برق صنعتی و فروش لطفا نظرات تون رو درباره این مقاله برام بنویسید.









سلام
خیلی عالی و کامل. سپاس
ممنونم
مقاله ی انکودر مقاله ی خیلی خوبی بود ممنون
ممنون مقاله خوب و کاملی بود .