در دنیای امروزی صنعت، به ندرت فرآیندی وجود دارد که بر آن نظارت نمیشود. نظارت بر کاربرد چرخشی سرعتی در فرآیندهای بسیاری، با هدف نظارت بر جهت، سرعت و هماهنگی انجام میشود. این نوع نظارت در کاربردهای بستهبندی، جابجایی و مخلوط کردن (و دیگر کاربردها) بسیار رایج است و از نظارت بر چرخشی سرعتی نیز به عنوان مکانیسم محافظت شخصی و ایمنی نیز استفاده میشود.

عملکرد سنسورهای القایی در نظارت بر کاربرد چرخشی سرعتی
تکنولوژیهای متفاوت بسیاری وجود دارند که به عنوان منابع ورودی برای نظارت بر سرعت چرخشی استفاده میشوند، همچون سنسورهای القایی، سنسورهای فتوالکتریک، رزولورها، انکودرها و ژنراتورهای تاکومتر (دورسنج موتور). این دستگاهها برای سنس کردن پالس و/یا جهت چرخش یا مجموعهای از اهداف چرخشی مورد استفاده قرار میگیرند.
هر چقدر هماهنگی بیشتری در فرآیندها مورد نیاز باشد، خروجی کلی تولید بالاتر خواهد بود. برخلاف ژنراتورهای تاکومتر و ژنراتورهای پالس چرخشی رایج، سنسورهای مجاورتی نیازمند هیچ اتصال فیزیکی به المان درایو نیستند تا بتواند تشخیص حرکت را انجام دهند.
در اکثر موارد، سرعت یک قطعه چرخشی در ماشین (همچون محورها، دندهها، بادامکها و غیره) مستقیما تحت نظارت قرار میگیرند تا نیاز به المانهای کنترل ویژه یا اضافه یا عملگرها نباشد.
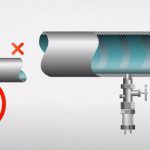
زمان اندازهگیری به سلسله پالس ورودی دیجیتال وابسته است. هر چقدر پالسها در هر چرخش بیشتر باشند، زمان اندازهگیری کوتاهتر خواهد بود. در زمان استفاده از سنسورهای القایی، فاصله یا هوای بین اهداف باید بزرگتر یا مساوی قطر سنسور مجاورت embeddable (تعبیهشده) باشد.
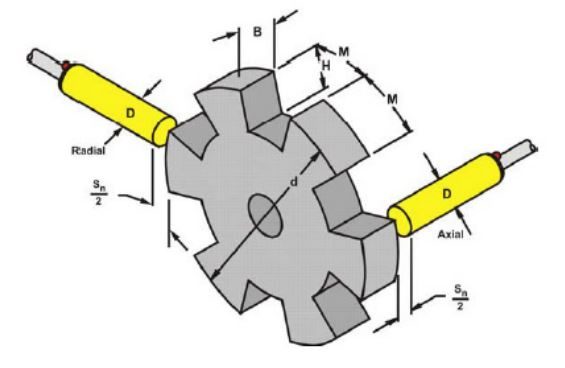
توصیههای عمومی برای عرض Tooth و Gap
برای سنسورهای embeddable (قابل جاسازی یا قابل تعبیه):
M ≥ D (ابعاد هدف باید ≥ مساحت سطح وجه رویی سنسور)
برای سنسورهای non-embeddable (غیر قابل جاسازی):
*M ≥ (۳ x Sn)
برای کاربردهای سرعت بالا، زمان پاسخگویی سنسور باید در محاسبه در نظر گرفته شود.
برای سنسورهای embeddable:
M = N x d x π x T + D
۶۰,۰۰۰
برای سنسورهای non-embeddable:
M = N x d x π x T + (3x Sn)*
۶۰,۰۰۰
توصیه میشود از یک tooth بزرگ استفاده کنید و فاصله بین teeth را افزایش دهید.
* Replace (3 x Sn) with D when (3 x Sn) < D
وقتی که (۳xSn)<D است، (۳xSn) را با D جایگزین کنید
D = قطر سنسور مجاورت (mm)
M = Tooth/gap عرض (mm)
d = قطر دیسک (mm)
H = Tooth عمق: نصب محوری H ≥ D
نصب شعاعی ۲ x Sn
N = حداکثر سرعت چرخشی یا شی (RPM)
T = حداقل مدت سوئیچینگ سنسور (۱/max. فرکانس سوئیچینگ سنسور) در واحد میلیثانیه [ms]
B = ضخامت دیسک: نصب محوری حداقل یک میلیمتر
نصب شعاعی B ≥ D
۲/Sn = فاصله نصب توصیهشده (mm)
وقتی از سنسورهای القایی به عنوان دستگاههای ورودی استفاده میشود، نقاط زیر را باید زیر نظر بگیرید:
- در هنگام استفاده از اهداف با فولاد نرم، سنسور باید در نصف بازه سنسینگ اسمی قرار گیرد. این شامل سنسورهایی با تکنولوژی Factor 1 نمیشود.
- فاکتورهای اصلاحی برای اهداف غیر فلزی همیشه باید در نظر گرفته شوند. این شامل سنسورهایی با تکنولوژی Factor 1 نمیشود.
- سنسورهای embeddable و non-embeddable نیازمند اهدافی متفاوت بسته به میدانهای متفاوت نوسانساز هستند.
- دستگاههای non-embeddable نیازمند مساحت عاری از فلز پیرامون وجه سنسینگ هستند.
کاربرد چرخشی سرعتی روی پالسهای شمارش نظارت میکند اما برخی همچنین طراحی شدهاند تا شرایط over speed/under speed (سرعت بیش از حد/کمتر از حد) را به تجهیزات کنترل منتقل کنند.
نظارت بر over speed، اندازه میگیرد که آیا پالسها از پارامترهای خاصی عبور کردهاند یا خیر، به طور مثال اگر در حال نظارت بر یک تسمه موتوردار باشیم. اگر تسمه پاره شود، موتور هم سریعتر خواهد شد چون دیگر گشتاوری در برابر بار وجود ندارد؛ سرعت افزایش پیدا کرده توسط نظارت over speed تشخیص داده میشود و در این حالت، سیستم را خاموش میکند.
نظارت under speed زمانی رخ میدهد که پارامترهای شناسایی نقطه ایمن پیادهسازی میشوند، همچون شناسایی و خاموش شدن یک سیستم مشخص. علاوه بر موارد دیگر، این روشها محافظتی در برابر پارگی تسمه، سُر خوردن کانوایر و گیر کردن آن ارائه میکنند و به هماهنگسازی کلی فرآیند کمک میکنند.
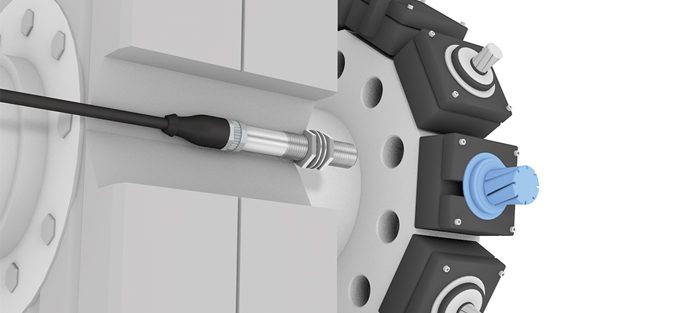
علاوه بر نظارت بر پالسها و جهات، سنسورهای مجاورتی القایی همچنین برای فرقگذاری جهتدار استفاده میشوند، زمانی که دو سنسور برای تعیین جهت جلو و معکوس یک سیستم استفاده شوند. جهت چرخش را با ارزیابی توالی و دمپینگ همزمان (تریگر یا راه اندازی) هر دو سنسور برای حداقل یک میلیثانیه به دست میآورد.
سنسورهای مجاورت غیرتماسی در مقایسه با پیادهسازی انکودرها یا ژنراتورهای تاکومتر، مزایای بسیاری را در این کاربردها برای کاربران به ارمغان میآورند. از آنجایی که این سنسور در تماس با کاربرد نیست، میتوان آن را به سرعت جایگزین کرد و عملا نیاز به نگهداری و تعمیر ندارد، در نتیجه زمان کلی downtime را کاهش میدهد – حتی اگر لازم باشد فرآیند متوقف شود.