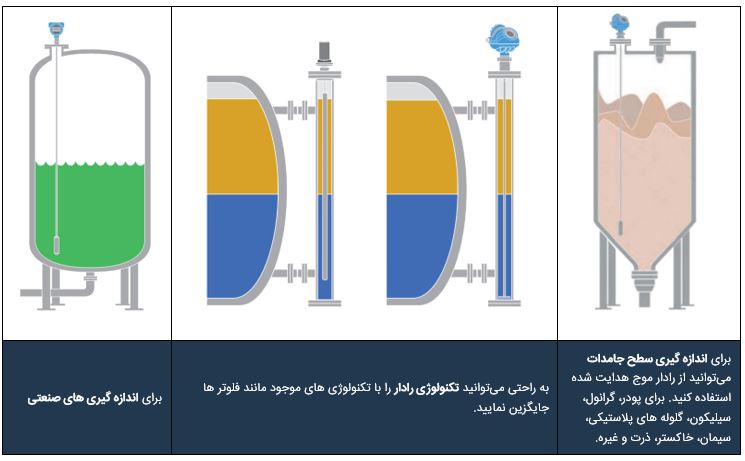
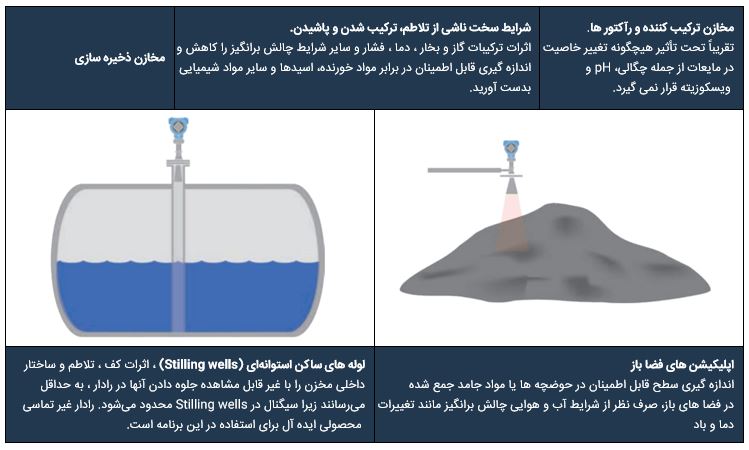
انواع سیالات هر روز در مخازن ذخیره سازی پر و خالی می شوند. به عنوان مثال می توان به آب آشامیدنی، آب میوه، روغن ها و سوخت ها، اسیدها، آب نمک یا مواد جامد مانند شن، ماسه یا پودرها اشاره کرد. اندازه گیری میزان مواد موجود در مخزن راکتور یا هر مخزن دیگری ساده است اما هر محفظه و هر محصولی، مجموعه ای از چالش های خاص خود را دارد بنابراین گذشت زمان و طیف گسترده ای از اپلیکیشن ها منجر به ایجاد بسیاری از فناوری های سنسور سطح (بویژه سنسور رادار ) در هر طراحی شده است.

فهرست مطالب
تعریف و آشنایی اولیه با سنسور رادار
اصول اندازه گیری سطح با سنسور رادار
سنسور سطح رادار موج هدایت شده یا “Guided-wave Radar”
سنسور سطح رادار غیر تماسی (بدون پروب) یا “Non-contact Radar”
جزئیات بیشتر در مورد اصول اندازه گیری به روش رادار
درستی اندازه گیری سطح به روش رادار
انواع اندازه گیری سطح
سنسور های اندازه گیری سطح را می توان به دو دسته تقسیم بندی کرد:
- اندازه گیری سطح نقطه ای (Point level measurement)
- اندازه گیری مداوم سطح (Continuous level measuring)
اندازه گیری سطح نقطه ای، ماده ای را که در نقطه ای خاص وجود دارد نشان می دهد و اندازه گیری مداوم سطح، دائماً سطح محصولی را که در حال بالا و پایین رفتن است نشان می دهد. سنسورهای نشانگر نقطه ای سطح شامل سنسور های خازنی (Capacitance)، نوری (Photoelectric)، رسانایی (Conductivity)، ارتعاشی (Vibrating) یا چنگالی (Tuning Fork) و فلو سوییچ (Float switch) هستند. سنسور های اندازه گیری مداوم سطح شامل “التراسونیک” و “رادار” می باشند. ما در مورد چگونگی عملکرد سنسور های رادار و مناسب ترین اپلیکیشن ها برای فناوری آنها و همچنین محدودیت های آنها در برخی از اپلیکیشن ها صحبت خواهیم کرد.
تعریف و آشنایی اولیه با سنسور رادار
سنسور های رادار دستگاه هایی برای تبدیل سیگنال های اکوی مایکروویو (Microwave echo signals) به سیگنال های الکتریکی هستند. بر خلاف سنسور های دیگر، سنسور های رادار تحت تأثیر دما، فشار یا گرد و غبار قرار نمی گیرند و با توانایی تشخیص انسداد مانند شیشه ، می توانند مواد را در طرف دیگر انسداد تشخیص دهند. وقتی با سایر فناوری های بکار رفته در سنسور های دیگر مقایسه می شود ، مانند التراسونیک، رادار می تواند مسافت بیشتری را سنس کند و برای افراد و حیوانات ایمن تر است. تفاوت اساسی بین رادار و التراسونیک در نوع موج مورد استفاده در آن ها است: امواج رادیویی در رادار و امواج صوتی در التراسونیک.
امواج رادیویی ماهیت الکترومغناطیسی (متشکل از میدان های الکتریکی و مغناطیسی متناوب) و فرکانس بسیار بالا (در محدوده فرکانس مایکروویو – گیگاهرتز) دارند.
امواج صوتی ارتعاشات مکانیکی هستند (از مولکولی به مولکولی دیگر در یک ماده مایع یا جامد منتقل می شوند) و فرکانس بسیار کمتری نسبت به امواج رادیویی دارند (ده ها یا صدها کیلوهرتز – هنوز هم برای تشخیص انسان به عنوان یک صوت خیلی زیاد است).
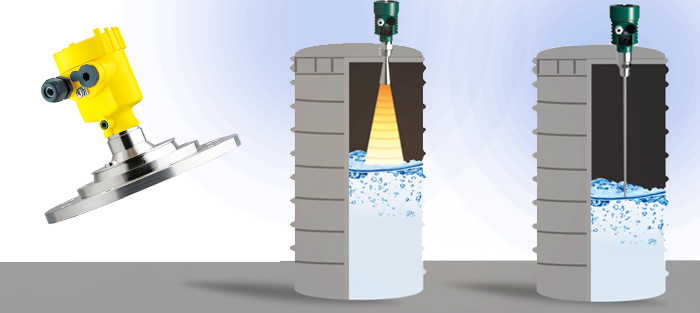
برخی از سنسور های سطح رادار از “پروب” های هدایت کننده موج جهت هدایت امواج الکترومغناطیسی به/از محصول موجود در فرآیند استفاده می کنند، در حالی که برخی دیگر امواج الکترومغناطیسی را به فضای باز بیرون منتشر می کنند تا از محصول موجود در فرآیند منعکس شوند. سنسور هایی که از پروب های هدایت کننده امواج استفاده می کنند ، “سنسور رادار موج هدایت شده” یا “Guided-wave Radar” نامیده می شوند، در حالی که سنسور رادار متکی به فضای باز برای انتشار سیگنال ، سنسور رادار “غیر تماسی” یا Non-contact Radar” نامیده می شوند.

از چپ به راست به ترتیب – سنسور رادار موج هدایت شده و سنسور رادار غیرتماسی
اصول اندازه گیری سطح با سنسور رادار
تکنولوژی های بکار رفته در سنسور رادار شامل:
Time Domain Reflectometry (TDR) / Time-of-Flight (ToF)/ Pulse Technology
Frequency Modulated Continuous Wave (FMCW) Radar
ToF یا زمان پرواز به طور مداوم سطح را در مخازن و سیلوها اندازه گیری می کند. سنسور رادار با پالس های راداری فرکانس بالایی کار می کند که توسط یک آنتن (Antenna) منتشر و از سطح سیال به دلیل تغییر مقدار دی الکتریک (ثابت دی الکتریک نسبی) منعکس می شود. فاصله بین سنسور و سطح محصول را می توان با اندازه گیری زمان پرواز (اختلاف زمان ارسال و دریافت یک پالس موج) محاسبه کرد. اگر هندسه مخزن مشخص باشد ، می توان سطح را از این متغیر محاسبه کرد. ما باید ثابت دی الکتریک (DC) ماده موجود در مخزن را بدانیم، زیرا این امر تأثیر مستقیم بر کیفیت بازتاب دارد. در واقع ، محصولات با مقادیر DC بالا ، منعکس کننده پالس های قوی و واضح تری هستند. از طرف دیگر ، ماده ای با مقدار DC پایین ، پالس بیشتری را جذب می کند ، بازتاب کمتری دارد و خوانش دقیق سطح را کاهش می دهد.
Time Domain Reflectometry / Time of Flight / Pulse Technology
سنسور رادار پالس های الکترومغناطیسی با شدت کم با پهنای تقریباً یک نانو ثانیه را در امتداد یک رسانای سخت یا انعطاف پذیر منتقل می کند. این پالس ها با سرعت نور حرکت می کنند. وقتی پالس ها به سطح ماده می رسند، پالس ها با شدتی بسته به ثابت دی الکتریک ماده (ε) منعکس می شوند. (برای مثال، آب ثابت دی الکتریک بالایی دارد و پالس های منعکس شده از سطح ماده، ۸۰ درصد شدت پالس های اولیه ی منتشر شده است)
در ویدیوی زیر قصد داریم تا شما را با نحوه عملکرد فناوری ToF از برند VEGA آشنا کنیم:
دستگاه زمان ارسال پالس به سمت محصول تا زمان دریافت پالس های برگشتی از سطح آن را اندازه گیری می کند: نیمی از این زمان معادل فاصله از نقطه مرجع دستگاه (مثلاً سطح فلنج) تا سطح محصول است. مقدار زمان به یک جریان خروجی ۴ تا ۲۰ میلی آمپر و/یا یک سیگنال دیجیتال تبدیل می شود.
فواصل طولی برای کالیبراسیون سنسور رادار
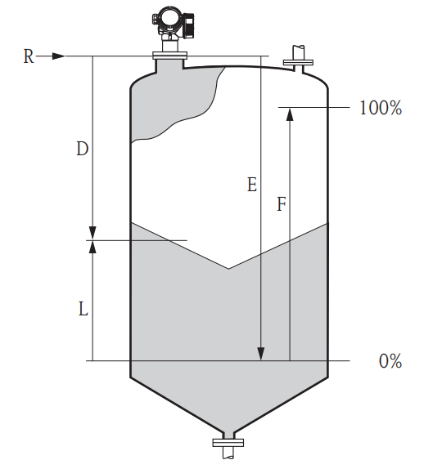
فاصله (D) تا سطح متناسب با زمان پرواز (t) پالس از رادار است. فرمولی که ریزپردازنده رادار استفاده می کند در زیر آمده است:
۲ / (سرعت نور (C) x زمان رفت و برگشت (t) )= (D) فاصله
در اینجا ، c نشان دهنده سرعت نور است.
بعد از اینکه دستگاه فاصله (D) را پیدا کرد ، می¬تواند سطح (L) را براساس فاصله خالی (E) محاسبه کند:
L = E-D
بازتاب های متداخل
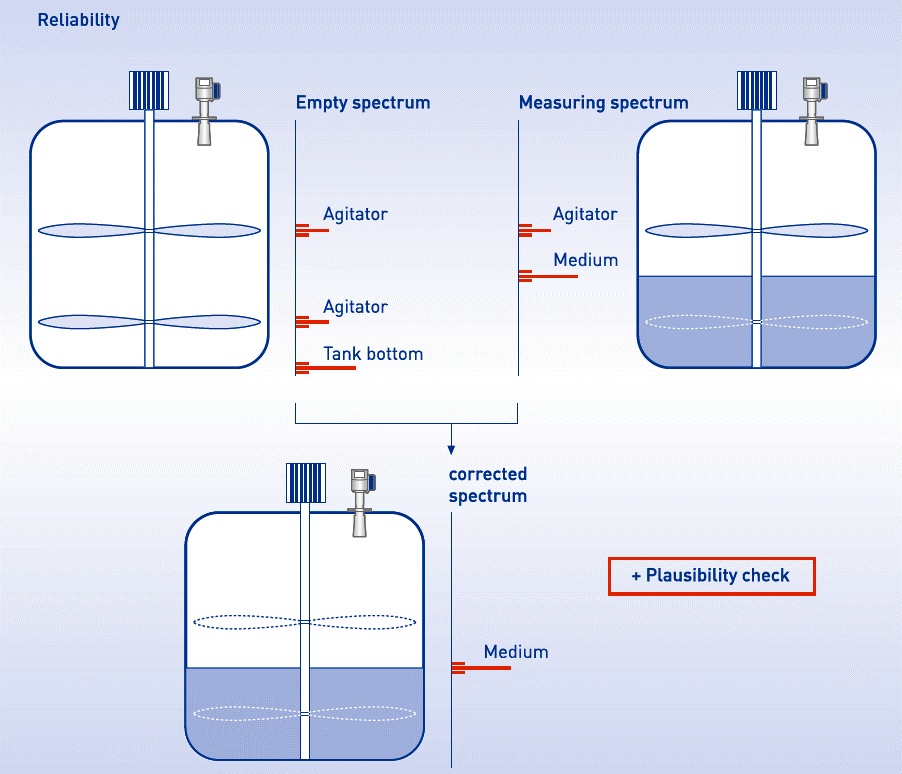
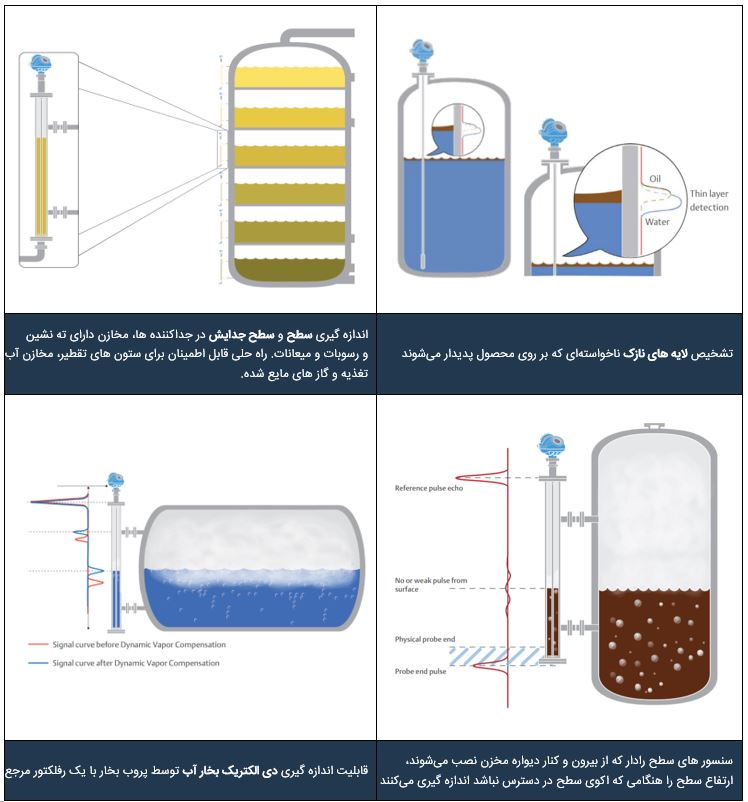
تمام بازتاب های متداخل، که ناشی از قرار دادن مخزن متحرک، همزن، نردبان و … است، با ثبت یک حالت خالی از مخزن قابل شناسایی و ذخیره هستند. بازتاب از سطح با اطمینان شناسایی، از بازتاب های متداخل متمایز و با مقایسه حالت خالی با بازتاب در حالتی که مخزن پر است، تجزیه و تحلیل می شود. برای اپلیکیشن هایی که مخازن در زمان راه اندازی نمی توانند تخلیه شوند، رادار سنج ها توانایی ضبط حالت خالی از مخزن را دارند.
Frequency Modulated Continuous Wave (FMCW) Radar
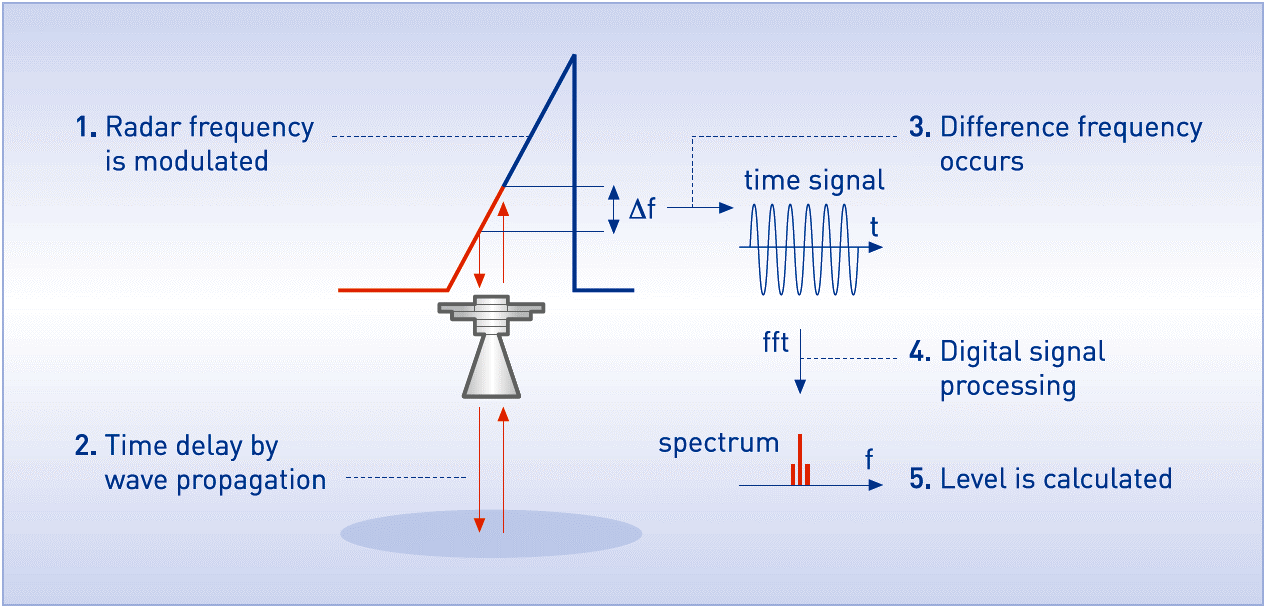
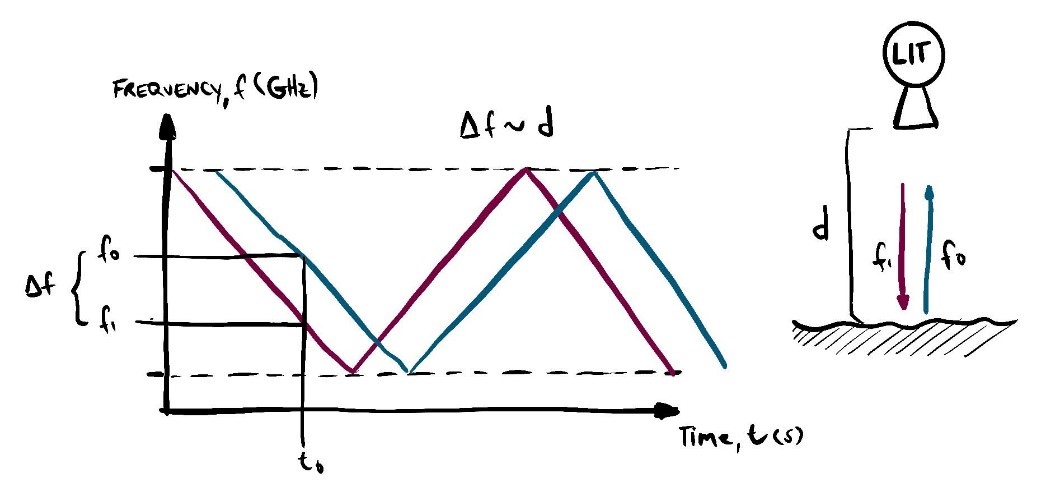
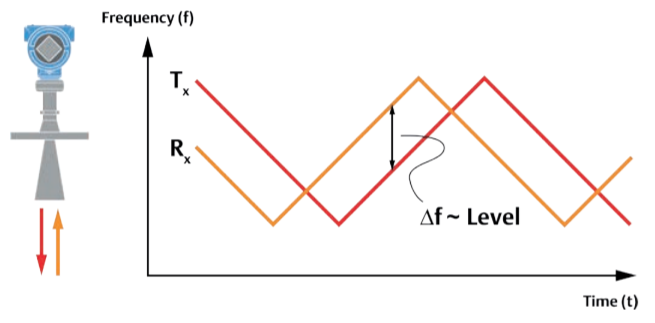
سنسور رادار با تکنولوژی FMCW سیگنال رادار با فرکانس بالا منتشر می کند که فرکانس آن در طول فاز اندازه گیری به صورت خطی افزایش می یابد (که Frequency sweep نامیده می شود). سیگنال رادار از طریق آنتن ساطع، بر روی سطح محصول منعکس و پس از مدت زمان t دریافت می شود.
زمان رفت و برگشت معادل t = 2d / c در حالی که d فاصله تا سطح محصول و c سرعت نور در گاز بالای محصول است. برای پردازش بیشتر سیگنال، اختلاف فرکانس واقعی انتشار و فرکانس دریافتی (Δf) محاسبه می شود. اختلاف فرکانس مستقیماً با فاصله از سطح متناسب است.
در ویدیوی زیر قصد داریم تا شما را با نحوه عملکرد فناوری FMCW از برند وگا (VEGA) آشنا کنیم:
اختلاف فرکانس زیاد مربوط به فاصله زیاد و بالعکس است. اختلاف فرکانس Δf از طریق تبدیل فوریه (FFT) به یک طیف فرکانسی تبدیل می شود و سپس فاصله از طریق طیف بدست آمده محاسبه می شود. سطح از اختلاف بین ارتفاع مخزن و فاصله اندازه گیری شده حاصل می شود.
سنسور های رادار در دو نوع طراحی و تولید می شوند:
- Guided Wave Radar (GWR)
- Non-contact Radar (NCR)
سنسور سطح رادار موج هدایت شده یا “Guided-wave Radar”
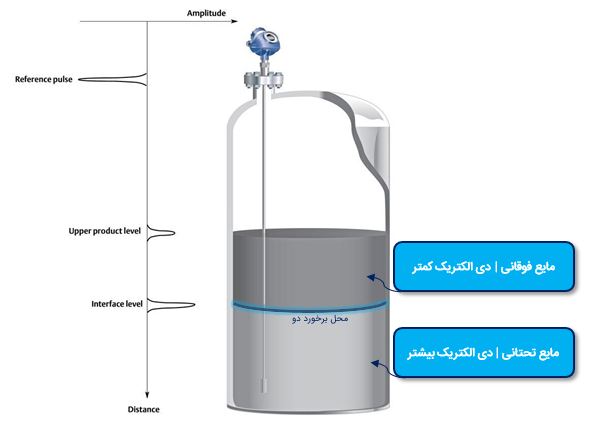
اندازه گیری سطح در این نوع سنسور بر پایه ی اختلاف زمانی بین ارسال و دریافت یک پالس مایکروویو که توسط یک پروب به پایین هدایت و از سطح سیال به سمت بالا منعکس می شود (TDR) می باشد. در نقطه ای که سطح مایع حضور دارد (محل برخورد هوا و محصول) روی پروب، بخش قابل توجهی از انرژی مایکروویو به بالای پروب به سمت سنسور رادار منعکس می شود. سنسور، تأخیر زمانی بین سیگنال ارسال شده و اکوی سیگنال دریافت شده را اندازه گیری و ریزپردازنده موجود در ترانسمیتر با استفاده از فرمول زیر فاصله را محاسبه می کند:

۲ / (سرعت نور (C) x زمان رفت و برگشت(t) )= (D) فاصله
هنگامی که سنسور با ارتفاع مرجع برنامه ریزی شد – معمولاً پایین مخزن یا محفظه – ارتفاع مایع توسط ریزپردازنده محاسبه می شود.
معادله اساسی برای اندازه گیری سطح مخزن برابر است با:
فاصله – ارتفاع مخزن=سطح
از آنجا که بخشی از سیگنال از طریق مایعات با ضریب دی الکتریک کم به پایین پروب ادامه می یابد ، می توان اکوی دوم را از محل برخورد دو مایع (مایع-مایع) در نقطه ای پایین تر از سطح اولیه مایع تشخیص داد.
پروب های مورد استفاده در سنسور های رادار موج هدایت شده ممکن است یک میله فلزی single، میله های فلزی twin یا میله فلزی کواکسیال باشند. در نصب، سنسور رادار موج هدایت شده (GWR) در بالای مخزن یا محفظه نصب می شود و پروب معمولاً تا عمق کامل مخزن ادامه می یابد.
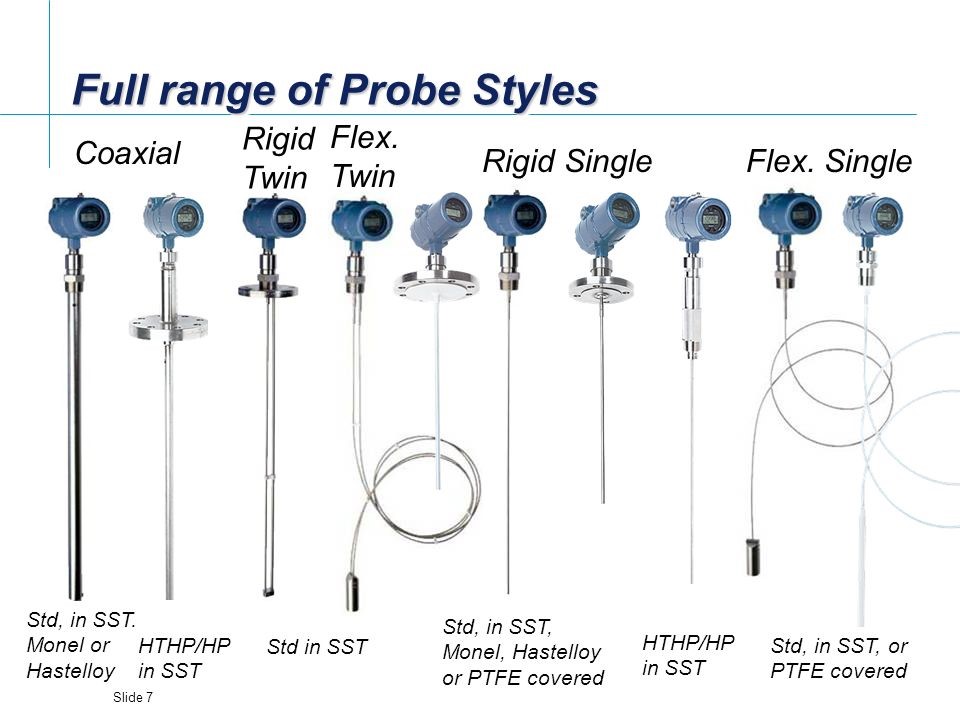
پروب های میله ای سینگل بیشترین تلفات انرژی را متحمل می شوند ، در حالی که پروب های کواکسیال در هدایت انرژی مایکروویو به محل برخورد دو مایع و انعکاس، بسیار عالی عمل می کنند.
با این حال، پروب های میله ای سینگل نسبت به پروب های میله ای تویین یا (به خصوص) کواکسیال ، که در آن توده های چسبنده مایع و یا ماده جامد به پروب می چسبند ، تحمل رسوب فرآیند بسیار بیشتری دارند.
چنین رسوباتی اگر به اندازه کافی شدید باشند، باعث ایجاد انعکاس های موج الکترومغناطیسی می شود که مانند انعکاس از سطح مایع یا سطح برخورد دو مایع، به سوی سنسور برمی گردند.
مزایای فناوری GWR
+ بدون قطعات متحرک و عدم نیاز به کالیبراسیون مجدد ، به حداقل رساندن هزینه های تعمیر و نگهداری
+ اندازه گیری مستقیم سطح – به معنای عدم نیاز به جبران برای تغییر شرایط فرآیند (چگالی سیال، ویسکوزیته، رسانایی، تلاطم، کف و گرد و غبار)
+ عدم تاثیر پذیری از بخار و گاز و تلاطم سیال مانند همزن ها
+ مناسب محفظه هایی با هندسه کوچک البته در محافظ و در مخازن، در هر اندازه حتی در حضور تداخلات و نویز ها
محدودیت ها
در حالی که رادار موج هدایت شده حتی در سخت ترین شرایط نیز کار می کند ، لازم است برخی اقدامات احتیاطی در مورد انتخاب پروب انجام شود. چندین نوع پروب وجود دارد و محدودیت های اپلیکیشن، طول و نصب بر انتخاب آنها تأثیر می گذارد. تا زمانی که از پروب به سبک کواکسیال استفاده نشده باشد ، پروب ها نباید در تماس مستقیم با یک جسم فلزی باشند، زیرا این امر سیگنال را تحت تأثیر قرار می دهد. اگر سیال چسبنده باشد، می توان از پروب سینگل استفاده کرد. برخی از GWR های پیشرفته موجود در بازار دارای تشخیص پیشرفته با قابلیت تشخیص تداخلات (رسوب یا مواد انباشته شده) در پروب هستند. محفظه هایی با قطر کمتر از ۳ اینچ (۷۵ میلی متر) ممکن است در حضور رسوبات مشکل ایجاد کنند و جلوگیری از تماس دیواره محفظه و پروب را دشوار کند.
کاربردهای سنسور رادار موج هدایت شده
سنسور سطح رادار غیر تماسی (بدون پروب) یا “Non-contact Radar”
برای اندازه گیری سطح با رادار غیر تماسی (NCR) ، دو تکنیک اصلی مدولاسیون وجود دارد:
• Time Domain Reflectometry (TDR) / Time-of-Flight (ToF)
• Frequency Modulated Continuous Wave (FMCW) Radar
 سیگنال مایکروویو که در مخزن منتشر می شود از سطح سیال منعکس می شود. سنسور رادار، تأخیر زمانی بین سیگنال ارسال شده و اکوی دریافت شده را اندازه گیری می کند و ریزپردازنده با استفاده از فرمول زیر فاصله را محاسبه می کند:
سیگنال مایکروویو که در مخزن منتشر می شود از سطح سیال منعکس می شود. سنسور رادار، تأخیر زمانی بین سیگنال ارسال شده و اکوی دریافت شده را اندازه گیری می کند و ریزپردازنده با استفاده از فرمول زیر فاصله را محاسبه می کند:
۲ / (سرعت نور (C) x زمان رفت و برگشت(t) )= (D) فاصله
هنگامی که سنسور با ارتفاع مرجع مخزن (ارتفاع مخزن بدون محصول) – معمولاً پایین مخزن یا محفظه – برنامه ریزی می شود، سطح محصول توسط ریزپردازنده از فرمول زیر محاسبه می گردد:
فاصله – ارتفاع مخزن=سطح
رادار FMCW نیز امواج مایکروویو را به سمت سطح سیال ارسال می کند ، اما سیگنال منتقل شده دارای فرکانسی است که دائماً تغییر می کند. وقتی سیگنال به سطح سیال برخورد و به طرف ترانسمیتر رادار منعکس می گردد، با سیگنالی که در آن زمان ارسال می شود ترکیب می شود. اختلاف فرکانس بین سیگنال دریافتی و ارسالی مستقیماً با فاصله تا مایع متناسب است.
از آنجا که غیر تماسی است ، سنسور در برابر خوردگی حساسیتی ندارد و برای مایعات چسبناک و ساینده یک گزینه ایده آل است.
رادار های غیر تماسی می توانند در مخازن با حضور همزن ها نیز استفاده شوند. دستگاه های فرکانس بالا را می توان با سیلد از نوع PTFE کاملاً از فرآیند جدا کرد و یا با ولو استفاده کرد.
فرکانس رادار غیر تماسی، می تواند عملکرد آن را تحت تأثیر قرار دهد. فرکانس پایین باعث کاهش حساسیت به بخار، کف و آلودگی آنتن سنسور می شود در حالی که فرکانس بالاتر، پرتو رادار را باریک نگه می دارد تا از نازل ها، دیواره ها و اشیاء مزاحم به راحتی عبور کند. عرض پرتو با اندازه آنتن نسبت عکس دارد. عرض پرتو در یک فرکانس معین با افزایش اندازه آنتن کاهش می یابد.
کدام باند فرکانسی؟
شما باید باند های فرکانسی را درک کنید یا برای تعیین اینکه کدام باند ها بیشتر با اپلیکیشن شما سازگار هستند از متخصصین کمک بخواهید. سنسورهای سطح غیر تماسی را می توانید با چهار باند مختلف در بازار پیدا کنید. بیشتر آنها از ۶ گیگاهرتز ، ۱۰ گیگاهرتز یا ۲۶ گیگاهرتز استفاده می کنند.
امروزه سنسور های جدید راداری با ۸۰ گیگاهرتز وارد بازار شده اند. این ها مزایای زیادی برای فرآیند به همراه می آورند ، زیرا در اپلیکیشن هایی که ترانسمیتر های رادار سنتی به فضای بیشتری برای ارسال موج نیاز دارند، بسیار مناسب تر هستند.
مزایا
+ رادار غیر تماسی با اندازه گیری فاصله تا سطح ، یک اندازه گیری مستقیم از بالا به پایین را فراهم می کند.
+ از آنها می توان با مایعات ، لجن ها ، دوغاب ها و برخی مواد جامد استفاده کرد.
+ یک مزیت اصلی رادار این است که تغییر در چگالی ، دی الکتریک یا رسانایی سیال هیچ گونه تاثیری برآن نمی گذارد.
+ تغییرات در فشار ، دما و شرایط فضای دارای بخار تاثیری در دقت اندازه گیری رادار ندارد.
+ ترانسمیتر های راداری غیر تماسی را می توان با استفاده از موانعی مانند سیلد (آب بندی) PTFE یا ولوها از فرآیند جدا کرد.
+ از آنجا که با سیال مورد اندازه گیری تماس ندارد ، برای کاربردهای خورنده و کثیف نیز مناسب است.
محدودیت ها
+ برای رادارهای غیر تماسی ، نصب خوب رمز موفقیت است. سنسور نیاز به یک دید واضح از سطح با یک نازل نصب صاف ، بدون مانع و بدون محدودیت دارد.
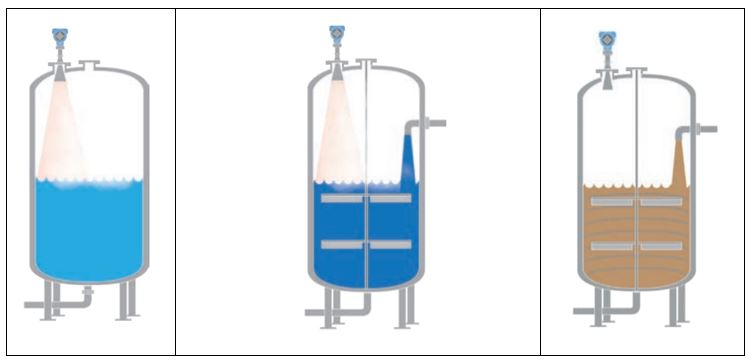
+ موانع موجود در مخزن ، مانند لوله ها و همزن ها می توانند پژواک (اکو) های کاذب ایجاد کنند، اما اکثر سنسور های رادار دارای الگوریتم های نرم افزاری پیچیده ای هستند که به شما اجازه می دهد این پژواک ها را بپوشانید یا نادیده بگیرید.
+ رادار غیر تماسی می تواند تلاطم را تحمل کند، اما موفقیت آنها به ترکیبی از ویژگی های مایع و میزان تلاطم بستگی دارد. ثابت دی الکتریک (DK) محیط و شرایط سطح بر اندازه گیری تأثیر می گذارد. اندازه گیری ممکن است تحت تأثیر وجود کف قرار گیرد. انرژی توسط کف سبک و بدون تراکم منعکس نمی شود در حالی که کف متراکم و سنگین معمولاً انرژی را منعکس می¬کند.
+ با مایعاتی با دی الکتریک پایین ، مقدار زیادی از انرژی تابش شده به مایع از دست می رود و انرژی بسیار کمی برای بازتاب به سنسور باقی می ماند. آب و اکثر محلولهای شیمیایی دارای DK بالا هستند. روغن مازوت ، روغن روان کننده و بعضی از مواد جامد، مانند آهک DK کمی دارند.
+ اگر سطح آشفته باشد، ناشی از همزنی، مخلوط شدن محصول یا پاشیدن، سیگنال بیشتری از بین می رود. بنابراین ترکیبی از یک سیال با دی الکتریک پایین و تلاطم می تواند سیگنال بازگشتی به یک رادار غیر تماسی را محدود کند. برای دور زدن این موضوع می¬توان از لوله های By pass یا لوله استوانه ای ساکن بعنوان محفظه برای جداسازی سطح از تلاطم استفاده کرد.
محافظ دی الکتریک
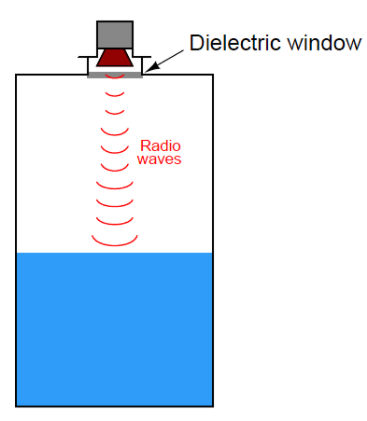
همانطور که قبلاً ذکر شد، سنسور های رادار غیر تماسی برای هدایت انرژی مایکروویو به داخل مخزن و دریافت انرژی اکو (پژواک) به آنتن ها متکی هستند. این آنتن ها باید تمیز و خشک نگه داشته شوند و در صورتی که مایعی که اندازه گیری می شود بخارهای قابل چگالش از خود ساطع می کند، ممکن است مشکل ایجاد کنند.
به همین دلیل، ترانسمیتر های رادار غیر تماسی غالباً با استفاده از یک محافظ دی الکتریک از فضای داخلی مخزن جدا می شوند.
اپلیکیشن های سنسور رادار غیر تماسی
صنایع:
• آب و فاضلاب
• غذا و نوشیدنی
• بهداشتی
• علوم زیستی
توجه:
سنسور های رادار غیر تماسی (NCR) به دلیل تمایل طبیعیِ تابش الکترومغناطیسی به پراکنده شدن در فضا، سیگنال بیشتری را نسبت به سنسور های رادار موج هدایت شده (GWR) از دست می دهد. سنسور های رادار موج هدایت شده با هدایت سیگنال مایکروویو در امتداد یک مسیر مستقیم با این افت سیگنال مقابله می کنند.

در ویدیوی زیر میتوانید عملکرد دو نوع سنسور رادار از برند Endress+Hauser را بطور خلاصه مشاهده نمایید:
جزئیات بیشتر در مورد اصول اندازه گیری به روش رادار
امواج الکترومغناطیسی در وکیوم کامل با سرعت نور ۲٫۹۹۷۹ × ۱۰۸ متر بر ثانیه حرکت می کنند. سرعت یک موج الکترومغناطیسی در فضا به ضریب دی الکتریک (نماد آن با حرف یونانی ∈r “epsilon”) آن فضا بستگی دارد.
فرمول سرعت موج نسبی (v) به گذردهی نسبی (نسبت گذردهی یک ماده به گذردهی همان ماده خلأ کامل که ثابت دی الکتریک ماده نامیده می شود) و سرعت نور در خلأ کامل (c) در اینجا نشان داده شده است:
همانطور که قبلاً ذکر شد، کالیبراسیون هر سنسور سطح مبتنی بر اکو، به دانستن سرعت انتشار موج در محیط جدا کننده سنسور از محصول بستگی دارد. برای سنسور های رادار که محصولی (مایع) را در زیر گاز یا بخار سنس می کنند ، این سرعت عبارت است از سرعت نور در آن گاز یا فضای بخار، که می دانیم تابعی از گذردهی الکتریکی است.
گذردهی نسبی هوا در فشار و دمای استاندارد تقریباً واحد است (۱). این بدان معنی است که سرعت نور در هوا تحت فشار اتمسفر و دمای محیط تقریباً برابر همان سرعت در خلأ کامل خواهد بود (۲٫۹۹۷۹ × ۱۰۸ در ثانیه).
اگر فضای بخار بالای مایع، هوای محیط نباشد و تحت تغییرات زیادی در دما و/یا فشار باشد که باعث تغییر چگالی بخار می شود، ممکن است گذردهی نسبی آن بخار و در نتیجه سرعت نور در آن فضا تغییر کند و در نهایت کالیبراسیون سنسور سطح را نیز تغییر می دهد. از این تغییر در کالیبراسیون گاهی اوقات به عنوان اثر فاز گاز (gas phase effect) یاد می شود.
یک فرمول مفید برای محاسبه گذردهی هر گاز یا بخار بر اساس فشار و دما در اینجا نشان داده شده است:
در حالی که،
∈r = گذردهی نسبی گاز در فشار (P) و دما (T) معین
∈ref = گذردهی نسبی همان گاز در فشار (Pref) و دما (Tref) استاندارد
P = فشار مطلق گاز (بار)
Pref = فشار مطلق گاز در شرایط استاندارد (حدوداً ۱ بار)
T = دمای مطلق گاز (کلوین)
Tref = دمای مطلق گاز در شرایط استاندارد (حدوداً ۲۷۳ کلوین)
این فرمول بر این اصل که گذردهی کلی، تابعی از چگالی می باشد استوار است. با اجرای یک آزمایش که در آن یک نمونه گاز متراکم تر می شود ، می توان دریافت که چرا این اتفاق می افتد.
با افزایش چگالی گاز ، مولکولهای بیشتری از گاز در همان حجم از فضا جا می شوند. اگر میزان گذردهی هر یک از مولکول های گاز بیشتر از گذردهی فضای خالی باشد ، سپس وجود بیشتر همان مولکول های گاز به معنای افزایش گذردهی آن حجم است. گذردهی بیشتر، البته، سرعت عبور نور را از میان گاز کاهش می دهد و در نتیجه بر کالیبراسیون ابزار رادار تأثیر می گذارد.
ارتباط این مفهوم با تغییرات فشار و دما در گاز ، می توان دریافت که با افزایش فشار (افزایش چگالی گاز) میزان گذردهی گاز افزایش می یابد و با افزایش دما (کاهش چگالی گاز) کاهش می یابد. این بدان معنی است که سرعت عبور نور از میان گاز با افزایش فشار کاهش و با افزایش دما افزایش می یابد. برای سنسور های سطح رادار که در محیط های گازی تحت تغییرات فشار و دمای قابل توجهی هستند (مانند چگالی)، تغییرات در سرعت عبور نور از میان گاز یا بخار ، درستی دستگاه را به خطر می اندازد.
برای سنسور های سطح التراسونیک ، شرط لازم برای ایجاد پژواک این است که موج صدا با تغییر ناگهانی چگالی مواد مواجه شود. در صورتی که برای سنسور های سطح رادار ، شرط لازم برای انعکاس امواج ، تغییر ناگهانی در میزان گذردهی نسبی یا ثابت دی-الکتریک است (∈). هنگامی که یک موج الکترومغناطیسی با تغییر ناگهانی در میزان دی الکتریک مواجه می شود ، مقداری از انرژی آن موج به شکل موج دیگری منعکس می شود که در جهت مخالف حرکت می کند ، در حالی که باقی مانده انرژی موج به جلو ادامه می یابد تا در متریال جدید منتشر شود. شدت سیگنال منعکس شده به میزان تفاوت گذردهی نسبی دو ماده بستگی دارد.
همین اصل بصورت یکسان، سیگنال های منعکس شده در خطوط انتقال مسی را به خوبی توضیح می دهد. هرگونه ناپیوستگی (تغییرات ناگهانی در امپدانس مشخصه) در طول خط انتقال، بخشی از توان سیگنال الکتریکی را به منبع منعکس می کند.
در یک سیستم اندازه گیری سطح رادار ، هرگونه تغییر ناگهانی در گذردهی الکتریکی (ثابت دی الکتریک) یک ناپیوستگی است که مقداری از انرژی موج را به سمت منبع منعکس می کند.
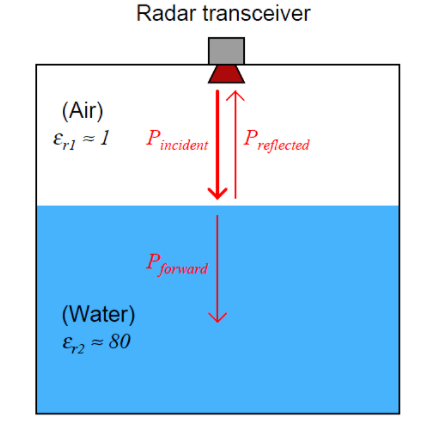
بنابراین، سنسور های سطح رادار زمانی بهترین عملکرد را دارند که اختلاف زیادی در مقدار دی الکتریک دو ماده در محل برخورد آن دو وجود داشته باشد. همانطور که در تصویر قبلی نشان داده شده است ، هوا و آب دارای این معیار هستند و دارای نسبت ۸۰:۱ هستند.
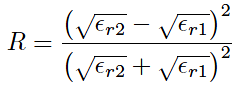
نسبت توان منعکس شده به توان ارسال شده (توسط سنسور) در محل برخورد مواد (Interfaces) را ضریب بازتاب توان (Power reflection factor or “R”) می نامند. R ممکن است به صورت یک نسبت بدون واحد و یا بیشتر اوقات به صورت یک عدد بر حسب دسی بل بیان شود. رابطه بین ثابت دی الکتریک و ضریب بازتاب توان به شرح زیر است:
در حالی که،
R = ضریب بازتاب توان در محل برخورد (بدون واحد)
∈r1 = ثابت دی الکتریک ماده اول
∈r2 = ثابت دی الکتریک ماده دوم
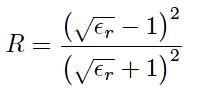
میزان توان عبوری از محل برخورد، مکمل ریاضی ضریب بازتاب توان بوده و از رابطه مقابل بدست می آید : ۱-R
برای شرایطی که سیال اول هوا یا برخی دیگر از گازهایی با ثابت دی الکتریک پایین باشد، فرمول به فرم زیر ساده می شود (∈r ثابت دی الکتریک ماده منعکس کننده):
در تصویر قبلی ، دو سیال هوا (∈r ≈ ۸۰) و آب (∈r ≈ ۴۲) بودند – سناریوی تقریباً ایده آل برای بازتاب سیگنال قوی – که مقدار ضریب بازتاب توان برای این دو سیال۰٫۶۳۸ (۶۳٫۸%) یا −۱٫۹۵ dBاست. این بدان معناست که بیش از نیمی از توان در محل برخورد هوا و آب منعکس می شود و یک سیگنال اکوی قوی ایجاد می کند ، در حالی که۰٫۳۶۲ (۳۶٫۲%) باقی مانده قدرت موج از محل برخورد آب و هوا عبور می کند و در آب پخش می شود.
اگر مایع مورد نظر بنزین باشد به جای آب (دارای ثابت دی الکتریک نسبتاً کم – تقریباً ۲)، ضریب بازتاب توان۰٫۰۲۹۴ (۲٫۹۴%) یا −۱۵٫۳ dB خواهد بود، یعنی اکثر قدرت موج از محل برخورد هوا و بنزین عبور و به درون بنزین نفوذ می کند.
نسخه طولانی تر از فرمول ضریب بازتاب توان نشان می دهد که محل های برخورد دو مایع (مایع-مایع) باید با استفاده از رادار قابل تشخیص باشند و در واقع این گونه هستند.
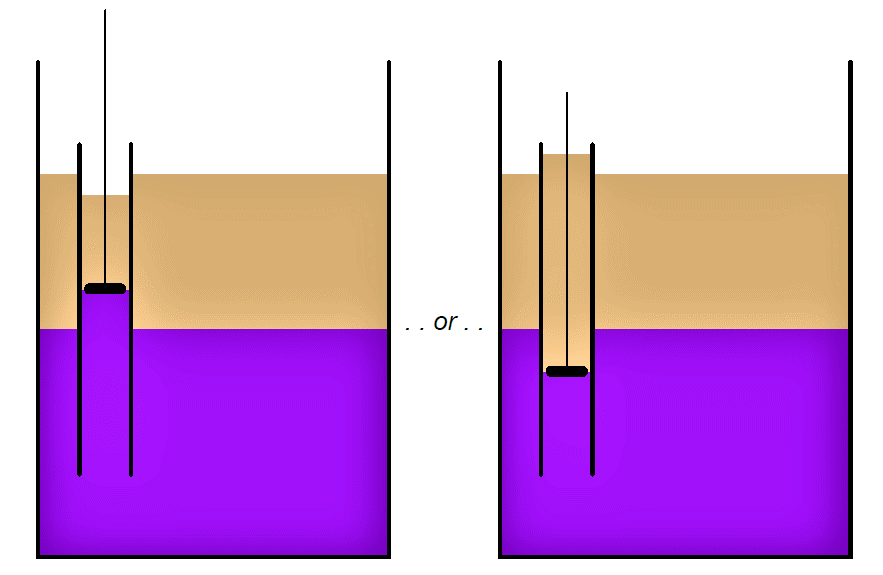
تنها چیزی که لازم است یک اختلاف بزرگ در ثابت دی الکتریک دو مایع است تا انعکاس کافی برای تشخیص مطمئن ایجاد شود. اندازه گیری سطح محل برخورد دو مایع (مایع-مایع) با رادار زمانی بهترین عملکرد را دارد که مایع فوقانی دارای ثابت دی الکتریک کمتری نسبت به مایع تحتانی باشد.
یک لایه روغن هیدروکربن در بالای آب (یا هر محلول آبی مانند یک اسید) یک گزینه مناسب برای اندازه گیری سطح توسط سنسور رادار موج هدایت شده (GWR) است.
در ویدیو زیر می توانید نحوه اندازه گیری سطح مایع-مایع توسط برند وگا را مشاهده نمایید:
مثالی از محل برخورد مایع-مایع که تشخیص آن برای سنسور رادار بسیار دشوار است، آب (∈r ≈ ۸۰) در بالای گلیسیرین (∈r ≈ ۴۲) است. اگر رادار از یک پروتکل شبکه دیجیتال برای برقراری ارتباط با سیستم هاست (مانند HART یا هر نوع دیگری از “fieldbus”) استفاده کند، ممکن است به عنوان یک ترانسمیتر چند متغیره عمل کند یعنی هم ارتفاع کلی سطح و هم ارتفاع محل برخورد دو مایع را بطور همزمان اندازه گیری کند. این قابلیت نسبتاً برای ترانسمیتر های رادار GWR منحصر به فرد است و در برخی از فرآیندها بسیار مفید است زیرا نیاز به تجهیزات مختلف برای اندازه گیری ارتفاعات مختلف را از بین می برد.
یکی از دلایل اینکه چرا برای تشخیص راحت تر، سیال با ∈ کمتر باید در بالای سیال با ∈ بیشتر قرار گیرد ضرورت عبور سیگنال از یک محیط گاز-مایع و سپس رسیدن به محیط مایع-مایع است. با گازها و بخارهایی که ثابت دی الکتریک کمی دارند، سیگنال برای رسیدن به محیط مایع-مایع ابتدا باید از محیط گاز-مایع عبور کند. این محیط گاز-مایع، با داشتن بیشترین اختلاف در مقادیر دی الکتریک نسبت به هر محل برخورد دیگری، بازتابنده بیشتر انرژی الکترومغناطیسی در هر دو جهت خواهد بود.
بنابراین فقط قسمت کوچکی از موج به محیط مایع-مایع خواهد رسید و به همین صورت قسمت کوچکی از موجی که از محل برخورد مایع-مایع بازتابیده است (که خودش بخشی از قدرت موجی است که در مسیرش به سمت پایین وارد محیط گاز-مایع شده است) در راهش به سمت ابزار وارد محیط گاز-مایع خواهد شد.
همانطور که در این مقایسه فرضی نشان داده شده است ، اگر مقدار ثابت دی الکتریک دو لایه مایع معکوس شود، وضعیت بسیار بهتر خواهد شد (در تمام محاسبات فرض می شود که در طول مسیر هیچ اتلاف نیرویی وجود ندارد، فقط بازتاب در محل های برخورد):
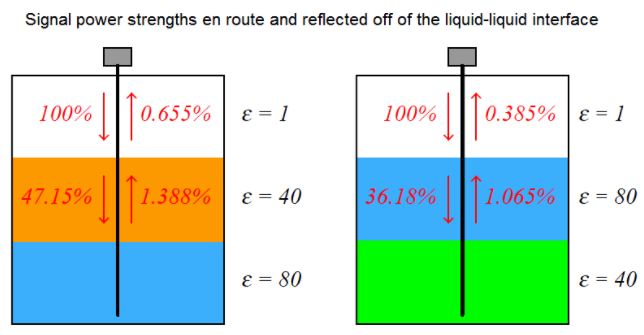
همانطور که در تصویر مشاهده می کنید ، تفاوت در میزان قدرت سیگنال برگشتی به سمت ترانسمیتر تقریباً دو به یک است آن هم از مایع فوقانی که مقدار مشابه دی الکتریک کمتری دارد.
مطمئناً، در زندگی واقعی شما توانایی انتخاب اینکه کدام مایع بر روی دیگر مایعات قرار بگیرد را ندارید (این امر با توجه به چگالی مایع تعیین می شود)، اما شما توانایی انتخاب تکنولوژی مناسب برای اندازه گیری سطح مایع-مایع را دارید و همانطور که در اینجا می بینید جهت گیری های خاص مقادیر دی الکتریک با رادار کمتر از سایرین قابل تشخیص است.
عامل دیگری که در برابر رادار بعنوان یک فناوری اندازه گیری سطح مایع-مایع برای محیط هایی که مایع فوقانی دارای ثابت دی الکتریک بیشتری است تاثیر می گذارد این واقعیت است که بسیاری از مایعات با دی الکتریک بالا در طبیعت ماهیت آبی دارند و آب نیز به راحتی انرژی مایکروویو را پراکنده می کند.
این واقعیت در اجاق های مایکروویو ، جایی که تابش مایکروویو باعث تحریک مولکول های آب در غذا می شود مشخص است که انرژی را به صورت گرما پراکنده می کند.
برای یک سیستم اندازه گیری سطح بر مبنای رادار که متشکل از گاز / بخار بر روی آب و آب نیز بر روی دیگر مایعات (مایعات سنگین تر) خواهد بود، سیگنال اکو بسیار ضعیف خواهد بود زیرا سیگنال قبل از بازگشت به سنسور باید دو بار از لایه آب عبور کند (یک بار رفت و یک بار برگشت) که منجر به از دست رفتن مقدار زیادی از توانش خواهد شد . اتلاف انرژی الکترومغناطیسی در سنسور سطح رادار بسیار مهم است، حتی وقتی که محل برخورد شناسایی شده گاز (یا بخار) ساده ای بر روی مایع باشد.
فرمول ضریب بازتاب توان فقط نسبت توان بازتاب شده به توان ارسال شده در محل برخورد سیالات را پیش بینی می کند. فقط به این دلیل که یک محیط هوا-آب ۶۳٫۸٪ از توان ارسال شده را منعکس می کند، به معنای بازگشت ۶۳٫۸٪ از توان ارسال شده به آنتن ترانسمیتر نیست! هرگونه اتلاف کننده در مسیر بین سنسور و سطح محصول، سیگنال را ضعیف می کند تا جایی که تشخیص آن از نویز دشوار می شود.
عامل مهم دیگر در به حداکثر رساندن توان منعکس شده، میزان درجه پراکنده شدن امواج مایکروویو در مسیر رسیدن به سطح (های) مایع و بازگشت به سنسور است. سنسور های رادار GWR درصد بسیار بیشتری از سیگنال ارسالی خود را نسبت به سنسور های رادار غیر تماسی دریافت می کنند، زیرا پروب فلزی که برای هدایت پالس های سیگنال مایکروویو استفاده می شود، از انتشار امواج (و در نتیجه ضعیف شدن) در طول مایعات جلوگیری می کند. به عبارت دیگر ، پروب به عنوان یک خط انتقال برای هدایت و تمرکز انرژی مایکروویو عمل می کند و مسیر مستقیم از سنسور به سطح مایع و بازگشت اکو بصورت مستقیم از سطح مایع به سنسور را تضمین می کند. به همین دلیل است که ترانسمیتر های رادار GWR تنها فناوری مؤثر برای اندازه گیری سطح محل برخورد دو مایع (مایع-مایع) است.
یک فاکتور بسیار مهم در اندازه گیری دقیق سطح با استفاده از ترانسمیتر های راداری این است که مقدار دی الکتریک هر ماده ای که بین سنسور رادار و سطح محصول مورد نظر قرار دارد به طور دقیق شناخته شود. دلیل این امر در وابستگی سرعت انتشار امواج الکترومغناطیسی به گذردهی نسبی دارد. یادآوری فرمول سرعت موج که قبلاً بیان کردیم:
در حالی که،
v = سرعت موج الکترومغناطیسی در یک ماده خاص
c = سرعت نور در خلأ کامل ((≈ ۳ × ۱۰۸ meters per second
∈r = گذردهی نسبی ماده (ثابت دی الکتریک)
در مورد اپلیکیشن هایی که فقط یک سیال مایع وجود دارد که چیزی جز گاز یا بخار بالای مایع وجود نداشته باشد، باید میزان گذردهی آن گاز یا بخار دقیقاً مشخص باشد. در اپلیکیشن هایی که دو مایع با گاز یا بخار باشد ، برای اندازه گیری دقیق سطح مایع-مایع باید میزان گذردهی نسبی گاز و مایع فوقانی کاملاً مشخص باشد. تغییر در ثابت دی الکتریک سیال یا سیالاتی که امواج مایکروویو باید از آن عبور و اکو شود، باعث می¬شود تابش مایکروویو در سرعتهای مختلفی پخش شود.
از آنجا که فناوری اندازه گیری در تمام رادار ها بر اساس زمان پرواز (ToF) سیگنال از طریق گاز یا بخار جدا کننده سنسور رادار از سطح محصول است، تغییر در سرعت موج گذرا از این سیالات بر مدت زمان مورد نیاز برای حرکت موج از ترانسمیتر و بازگشت اکو از سطح تأثیر می گذارد بنابراین، تغییرات در ثابت دی الکتریک، به میزان درستی ترانسمیتر سطح رادار مربوط خواهد شد.
عوامل مؤثر بر ثابت دی الکتریک گازها شامل فشار و دما هستند، به این معنی که درستی یک ترانسمیتر سطح رادار با تغییر فشار/دمای گاز متفاوت خواهد بود! همانطور که قبلاً اشاره کردیم، این موضوع تحت عنوان اثر فاز گاز نامیده می شود. به هیچ وجه نباید یک سنسور رادار را برای هر اپلیکیشن اندازه گیری سطح استفاده شود، مگر اینکه مقدار ثابت دی الکتریک سیالات فوقانی به طور دقیق مشخص و مشابه باشد. این مورد مشابه وابستگی به چگالی مایع است که ترانسمیتر های فشار هیدرواستاتیک با آن روبرو هستند. اگر چگالی مایع ناشناخته باشد یا به میزان زیادی تغییر کند، تلاش برای اندازه گیری سطح با ترانسمیتر فشار هیدرواستاتیک بی فایده است و اگر ثابت های دی الکتریک سیالات ناشناخته باشند یا دائماً تغییر کند، تلاش برای اندازه گیری سطح به روش رادار نیز بی فایده است.
یک روش برای جبران اثر فاز گاز در ترانسمیتر های سطح رادار، تجهیز این دستگاه به یک پروب مرجع با طول جهت دار ثابت به گونه ای که کل طول آن همیشه بالاتر از سطح مایع باشد (یعنی فقط گاز را حس کند). اگر گذردهی نسبی گاز ثابت باشد، زمان اکو در طول این پروب مرجع ثابت خواهد ماند. اما اگر گذردهی گاز تغییر کند، زمان تکرار پروب مرجع به طور متناوب تغییر می کند و به ریزپردازنده دستگاه اجازه می دهد تا میزان گذردهی گاز را اندازه گیری کند و در نتیجه محاسبات سطح مایع را بر اساس این تغییر شناخته شده تنظیم کند. این مفهوم مشابه پروب جبران کننده است که گاهی اوقات در سنسورهای سطح خازنی استفاده می شود، طراحی شده برای اندازه گیری گذردهی نسبی سیال به منظور جبران هرگونه تغییر در این پارامتر حیاتی.
همانند ابزارهای سطح اولتراسونیک، ابزارهای سطح رادار می توانند سطح مواد جامد را در مخازن (به عنوان مثال پودرها و گرانول ها) و نه فقط در مایعات را اندازه گیری کنند. همچنین ، چگالی کم ذرات جامد (به عنوان مثال مقدار قابل توجهی هوا بین ذرات جامد) باعث کاهش ثابت دی الکتریک مواد و در نتیجه ضعف اکوی رادار می شود.
درستی اندازه گیری سطح به روش رادار
پارامترهایی که برای دستیابی به دقت مورد نظر باید هنگام انتخاب ترانسمیتر سطح رادار در نظر گرفته شوند عبارتند از: رزولوشن برد (پهنای باند) و فرکانس. درستی قابل دستیابی ابزار سطح رادار موجود تا حد زیادی به نوع اپلیکیشن، نوع آنتن، نصب مکانیکی، وضعیت و کیفیت تجهیزات الکترونیک و نرم افزار پردازش اکو بستگی دارد. حتی اگر اثرات تغییرات دما و فشار بی نهایت کم باشد، با این حال از روش های جبران سازی برای این پارامترها نیز استفاده می شود. سایر تأثیرات در دقت یک ترانسمیتر سطح رادار عبارتند از نسبت سیگنال به نویز و تداخل.
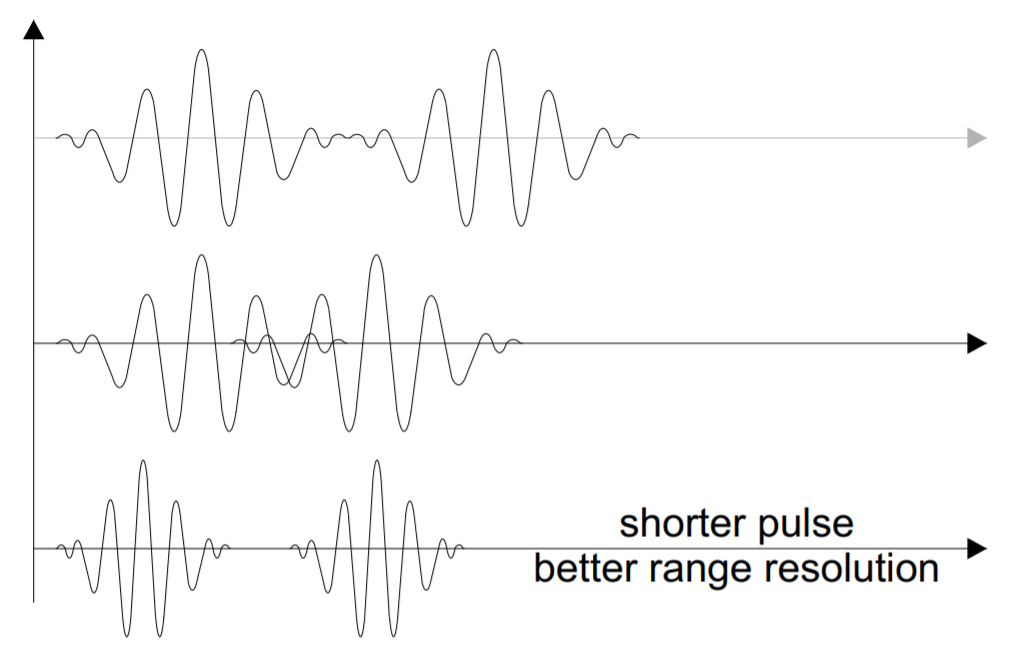
رزولوشن برد یا پهنای باند یکی از عواملی است که بر درستی در ترانسمیتر های سطح رادار فرآیند تأثیر می گذارد. درستی بالاتر ترانسمیتر های سطح رادار را می توان با مشاهده فاز یک موج جداگانه در envelope curve به دست آورد. در اپلیکیشن های اندازه گیری سطح، ترانسیمتر رادار با یک envelope curve کار می کند. طول این envelope curve به پهنای باند ترانسمیتر رادار بستگی دارد. پهنای باند وسیع تر منجر به envelope curve کوتاه¬تر و در نتیجه بهبود رزولوشن برد می شود (شکل زیر). این تنها در مخازن ذخیره سازی با حرکت آرام کاربردی است. اگر سطح مایع صاف و آرام باشد و اکو از دامنه معقولی برخوردار باشد ، می توان به داخل پک امواج envelope curve در یک فاز جداگانه نگاه کرد.
سرعت موج در تیوب اندازه گیری
سرعت امواج مایکروویو درون یک تیوب اندازه گیری در مقایسه با فضای آزاد ظاهراً کندتر است. اینکه کدامیک زمان رفت و برگشت کمتری دارد به قطر لوله و طول موج سیگنال بستگی دارد. حالت های مختلف انتشار امواج مایکروویو در یک راهنمای موج وجود دارد. با این حال ، یک پارامتر مهم، حداقل قطر لوله (dc) است که امکان انتشار امواج مایکروویو را فراهم می کند. مقدار حداقل یا قطر بحرانی (dc) به طول موج (λ) امواج مایکروویو بستگی دارد. هرچه فرکانس امواج مایکروویو بیشتر باشد ، به همان شکل نیز حداقل قطر تیوب اندازه گیری کوچکتری قابل استفاده است. معادله زیر رابطه بین قطر بحرانی و طول موج را نشان می دهد:
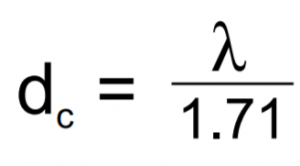
به عنوان مثال ، فرکانس ۵٫۸ گیگاهرتز دارای طول موج ۵۲ میلی متر است و حداقل قطر تئوری لوله نیز ۳۱ میلی متر است. در عمل قطر باید بیشتر باشد: حداقل ۴۰ میلی متر. با یک فرکانس ۲۶ گیگاهرتزی که طول موج آن ۱۱٫۵ میلی متر است باید حداقل قطر تیوب ۶٫۷۵ میلی متر باشد.
قدرت
حداکثر قدرت امواج مایکروویو در بیشتر ترانسمیتر های سطح رادار کمتر از یک میلی وات است. این سطح قدرت برای مخازن و سیلوهای ۴۰ متری یا بیشتر کافی است. افزایش قدرت مایکروویو، دامنه پژواک بیشتری ایجاد می¬کند. این امر باعث ایجاد انعکاس های کاذب و غلط، نویز پذیری و افزایش دامنه پژواک از سطح محصول می شود. متوسط قدرت مورد نیاز به مدت زمان پالس و فرکانس تکرار پالس ترانسمیتر های رادار بستگی دارد. کم بودن توان خروجی از ترانسمیتر رادار مایکروویو به این معنی است که این یک روش بسیار ایمن برای اندازه گیری سطح است.
مبانی آنتن
یک جنبه مهم آنتن “جهت دهی” است. جهت دهی توانایی آنتن برای هدایت حداکثر میزان انرژی مایکروویو تابش شده به سمت مایع یا جامد مورد نظر ما است. در صنعت از دو نوع آنتن استفاده می شود: ورژن های مختلف آنتن شامل میله دی الکتریک (dielectric rod antenna) ، آنتن بوقی (horn antenna) و آنتن لنزی (Lens Antenna) است. میله دی الکتریک یا آنتن بوقی برای اطمینان از تمرکز کامل و هدایت حداکثر میزان انرژی مایکروویو به سمت سطح مورد اندازه گیری و دریافت اکو های بازگشتی است. قسمت مخروطی میله ، مایکروویوها را به سمت ماده¬ای که اندازه گیری می¬شود متمرکز می¬کند. عملکرد یک آنتن در یک سنسور سطح رادار، هدایت حداکثر میزان انرژی مایکروویو به سمت سطح مورد اندازه گیری و دریافت حداکثر اکو های بازگشتی برای تجزیه و تحلیل در مدارات الکترونیک است. مهم نیست که آنتن چقدر خوب طراحی شده باشد چون به هر حال مقداری انرژی مایکروویو در هر جهت پخش خواهد شد. در اصل هدف به حداکثر رساندن جهت دهی (متمرکز کردن امواج به سمت محصول) است.
در ویدیوی زیر قادر خواهید بود شیوه عملکرد آنتن بوقی و لنزی را از برند وگا مشاهده نمایید:
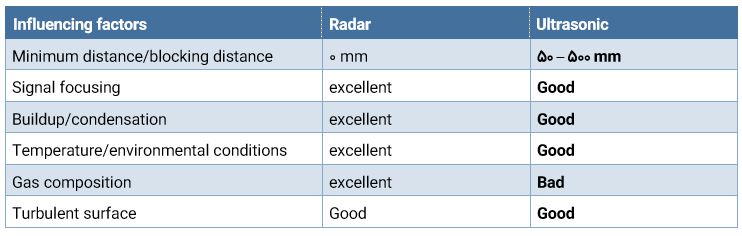
چرا سنسور رادار بهتر از سنسور التراسونیک است؟
تمرکز سیگنال رادار
تمرکز سیگنال رادار ارسال شده یک پیش نیاز ضروری برای جلوگیری از تداخل با سیگنال های اکوی نشأت گرفته از دیواره های مخزن یا محفظه، همزن ، نردبان یا خطوط لوله کشی می باشد.
در اصل می توان برای هر دو روش اندازه گیری گفت:
فرکانس بیشتر ، تمرکز بهتر
با این حال که در سنسور های التراسونیک، برای نگهداری تمرکز بر روی فواصل زیاد، به ترانسدیوسر بزرگ تری نیاز است. این بدان دلیل است که امواج صوتی با فرکانس های بالاتر در طول انتشار بیشتر از امواج با فرکانس های پایین تضعیف می شوند.
سنسور های رادار نتایج اندازه گیری قابل اطمینانی را حتی در فضاهای محدود یا در محفظه هایی با تعداد زیادی تجهیزات نصب شده داخلی ارائه می دهند.
چه تفاوتی بین اندازه گیری به روش رادار و التراسونیک وجود دارد؟
در ابتدا باید متوجه شوید که هردو چگونه عمل اندازه گیری را انجام می دهند. هر دو، سیگنال را ارسال می کنند. چه امواج صوتی و چه امواج رادیویی و درنهایت توسط سیال درون مخزن منعکس می شوند. سپس مدارات داخلی، فاصله را از زمان کلی سپری شده بین ارسال و دریافت را محاسبه می کنند.
مثل یک خفاش، درسته؟
امواج صوتی توسط طعمه منعکس می شود و خفاش اکوها را دریافت می کند. اختلاف زمانی به خفاش این اجازه را می دهد که محیط اطراف را سنس کند و همچنین فاصله حشرات و موانع اطراف را تخمین بزند.
اما تفاوت هایی بین التراسونیک و رادار وجود دارد که شامل:
سیگنال های رادار بسیار سریع تر از امواج صوتی التراسونیک حرکت می کنند اما سرعت خیلی مهم نیست!
اما امواج الکترومغناطیسی منتشر شده از سنسور رادار، مزایای بیشتری نسبت به امواج صوتی التراسونیک دارد.
همانطور که می دانید، امواج صوتی نیاز به هوا برای حرکت دارند. پس در اینصورت هر چیزی که بر روی هوا اثر بگذارد، بر روی امواج التراسونیک نیز اثر می گذارد. برای مثال: باد، دما، بخار ها یا گاز ها (برخلاف رادار)
رادار همچنین در هنگام پر شدن مخزن نیز بهتر عمل می کند.
وقتی قرارست تمام جنبه ها را در نظر بگیرید بهترین راه حل رادار ست.
نکات مهم در انتخاب سنسور مناسب برای اندازه گیری سطح مخزن
۱) شکل مخزن:
• مخزن کوچک یا بزرگ است؟
• مخزن گرد یا بصورت زاویه دار است؟
• در مخزن باز یا بسته است؟
• مخزن از چه ماده ای ساخته شده است؟
• آیا در مخزن همزن یا کویل گرمایشی وجود دارد؟
۲) سیال
• چه سیالی را می خواهید اندازه گیری کنید؟
• آیا سیال خورنده، اسیدی یا قلیایی است؟
• آیا حباب یا کف وجود دارد؟
• آیا سیال ویسکوز، چسبنده یا ساینده (abrasive) هست؟
• آیا در چگالی ماده (density) تغییری ایجاد می شود؟
۳) دما
• دمای سیال پایین یا بالا است؟ آیا بین دمای پایین و بالا نوسان می کند؟
• آیا دمای بیش از حد در سیستم وجود دارد و آیا بصورت ناگهانی است؟
۴) فشار
• کمترین و بیشترین فشار در فرآیند چقدر است؟
• آیا تغییرات سریع در فشار مانند فشار لحظه ای (پرشر اسپایک) وجود دارد؟
۵) شیوه نصب در فرآیند (the process fitting)
• شرایط نصب به چه گونه است؟
• آیا قرار است از بالا، پایین یا از جوانب اندازه گیری کنیم؟
• بصورت فلنجی یا بصورت کانکشن رزوه دار قرارست نصب شود؟
• آیا باید همه چیز ها بصورت بهداشتی و hygienic باشد؟
نویسنده: علی اکبر مسکین هستم. علاقه مند به برق صنعتی و فروش لطفا نظرات تون رو درباره این مقاله برام بنویسید.









درود بر شما اگر امکانش هست منابع رو ذکر بفرمایید
در صورت امکان به واتساپ یا ایمیل بنده ارسال نمایید ..
۰۹۳۶۶۵۵۰۲۶۸
milad.khabazzadeh@gmail.com
بسیار عالی و مفید بود .